DQN¶
Overview¶
DQN was proposed in Human-level control through deep reinforcement learning. Traditional Q-learning maintains an M*N Q value table (where M represents the number of states and N represents the number of actions), and iteratively updates the Q-value through the Bellman equation. This kind of algorithm will have the problem of dimensionality disaster when the state/action space becomes extremely large.
DQN is different from traditional reinforcement learning methods. It combines Q-learning with deep neural networks, uses deep neural networks to estimate the Q value, calculates the temporal-difference loss, and perform a gradient descent step to make an update. Two tricks that improves the training stability for large neural networks are experience replay and fixed target Q-targets. The DQN agent is able to reach a level comparable to or even surpass human players in decision-making problems in high-dimensional spaces (such as Atari games).
Quick Facts¶
DQN is a model-free and value-based RL algorithm.
DQN only support discrete action spaces.
DQN is an off-policy algorithm.
Usually, DQN uses eps-greedy or multinomial sampling for exploration.
DQN + RNN = DRQN.
The DI-engine implementation of DQN supports multi-discrete action space.
Key Equations or Key Graphs¶
The TD-loss used in DQN is:
where the target network \(Q_{\text {target }}\), with parameters \(\theta^{-}\), is the same as the online network except that its parameters are copied every target_update_freq steps from the online network (The hyper-parameter target_update_freq can be modified in the configuration file. Please refer to TargetNetworkWrapper for more details).
Pseudo-code¶
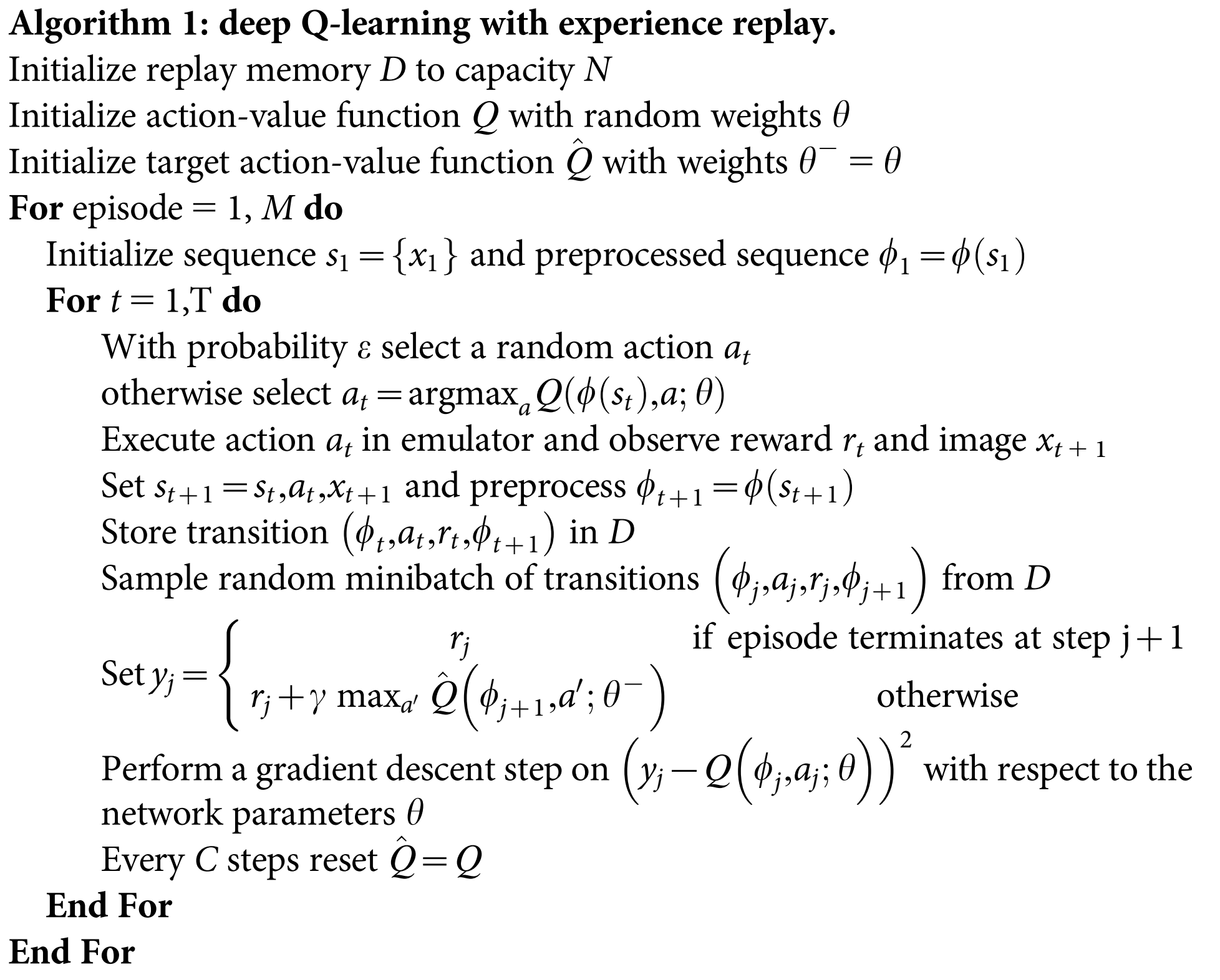
Note
Compared with the version published in Nature, DQN has been dramatically modified. In the algorithm parts, n-step TD-loss, PER and dueling head are widely used, interested users can refer to the paper Rainbow: Combining Improvements in Deep Reinforcement Learning .
Extensions¶
DQN can be combined with:
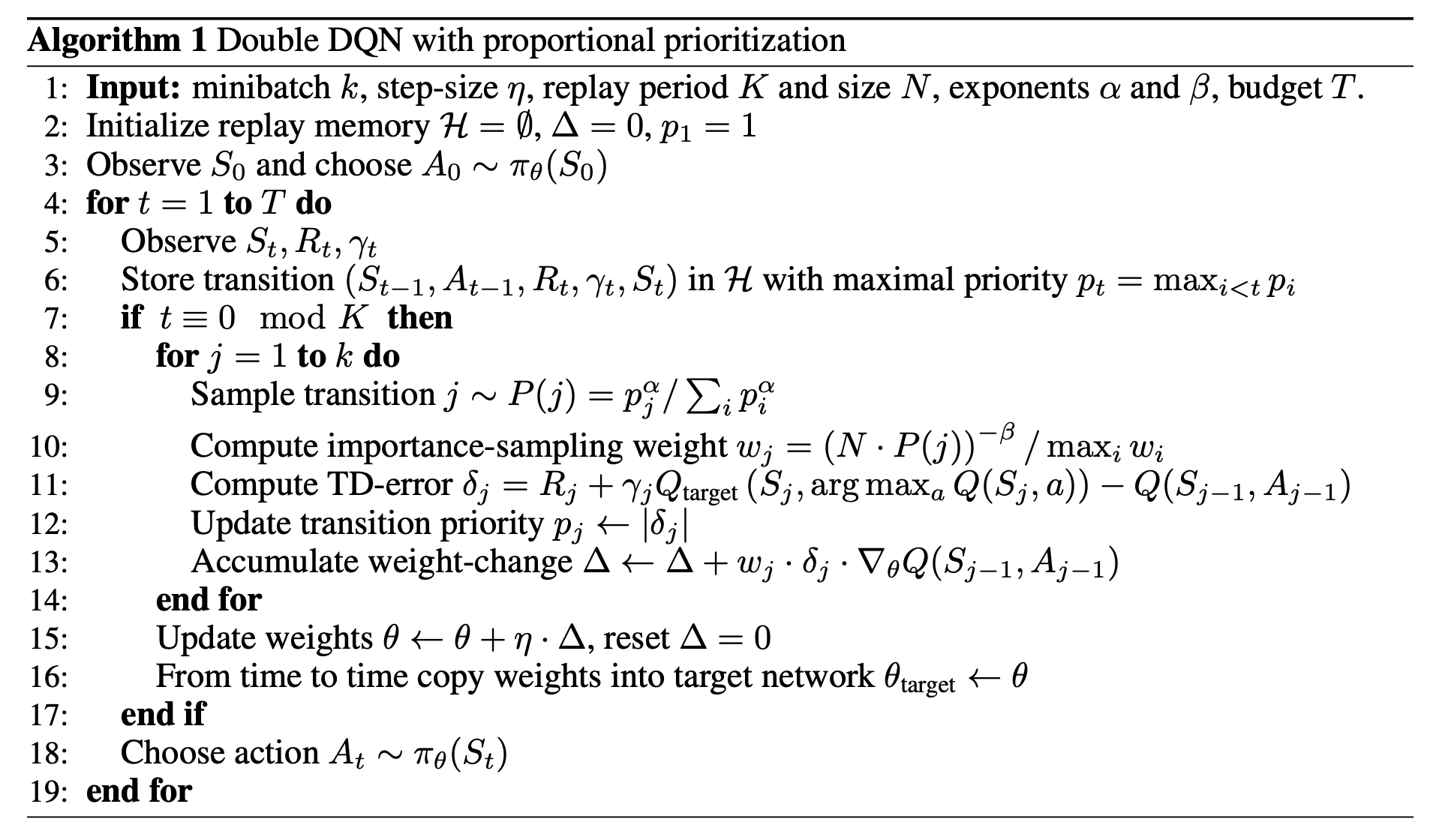
PER (Prioritized Experience Replay)
PER replaces the uniform sampling in a replay buffer with so-called
prioritydefined by various metrics, such as absolute TD error, the novelty of observation and so on. By this priority sampling, the convergence speed and performance of DQN can be improved significantly.There are two ways to implement PER. One of them is described below:
In DI-engine, PER can be enabled by modifying two fields
priorityandpriority_IS_weightin the configuration file, and the concrete code can refer to PER code . For a specific example, users can refer to PER exampleMulti-step TD-loss
In single-step TD-loss, the update of Q-learning (Bellman equation) is described as follows:
\[r(s,a)+\gamma \max_{a^{'}}Q(s',a')\]While in multi-step TD-loss, it is replaced by the following formula:
\[\sum_{t=0}^{n-1}\gamma^t r(s_t,a_t) + \gamma^n \max_{a^{'}}Q(s_n,a')\]Note
An issue about n-step for Q-learning is that, when epsilon greedy is adopted, the q value estimation is biased because the \(r(s_t,a_t)\) at t>=1 are sampled under epsilon greedy rather than the policy itself. However, multi-step along with epsilon greedy generally improves DQN practically.
In DI-engine, Multi-step TD-loss can be enabled by the
nstepfield in the configuration file, and the loss function is described inq_nstep_td_errorin nstep code.Double DQN
Double DQN, proposed in Deep Reinforcement Learning with Double Q-learning, is a common variant of DQN. The max operator in standard Q-learning and DQN when computing the target network uses the same Q values both to select and to evaluate an action. This makes it more likely to select overestimated values, resulting in overoptimistic value estimates. To prevent this, we can decouple the selection from the evaluation. More concretely, the difference is shown the the following two formula:
The targets in Q-learning labelled by (1) and Double DQN labelled by (2) are illustrated as follows:

Namely, the target network in Double DQN doesn’t select the maximum action according to the target network but first finds the action whose q_value is highest in the online network, then gets the q_value from the target network computed by the selected action. This variant can surpass the overestimation problem of target q_value, and reduce upward bias.
In summary, Double Q-learning can suppress the over-estimation of Q value to reduce related negative impact.
In DI-engine, Double DQN is implemented by default without an option to switch off.
Note
The overestimation can be caused by the error of function approximation(neural network for q table), environment noise, numerical instability and other reasons.
Dueling head
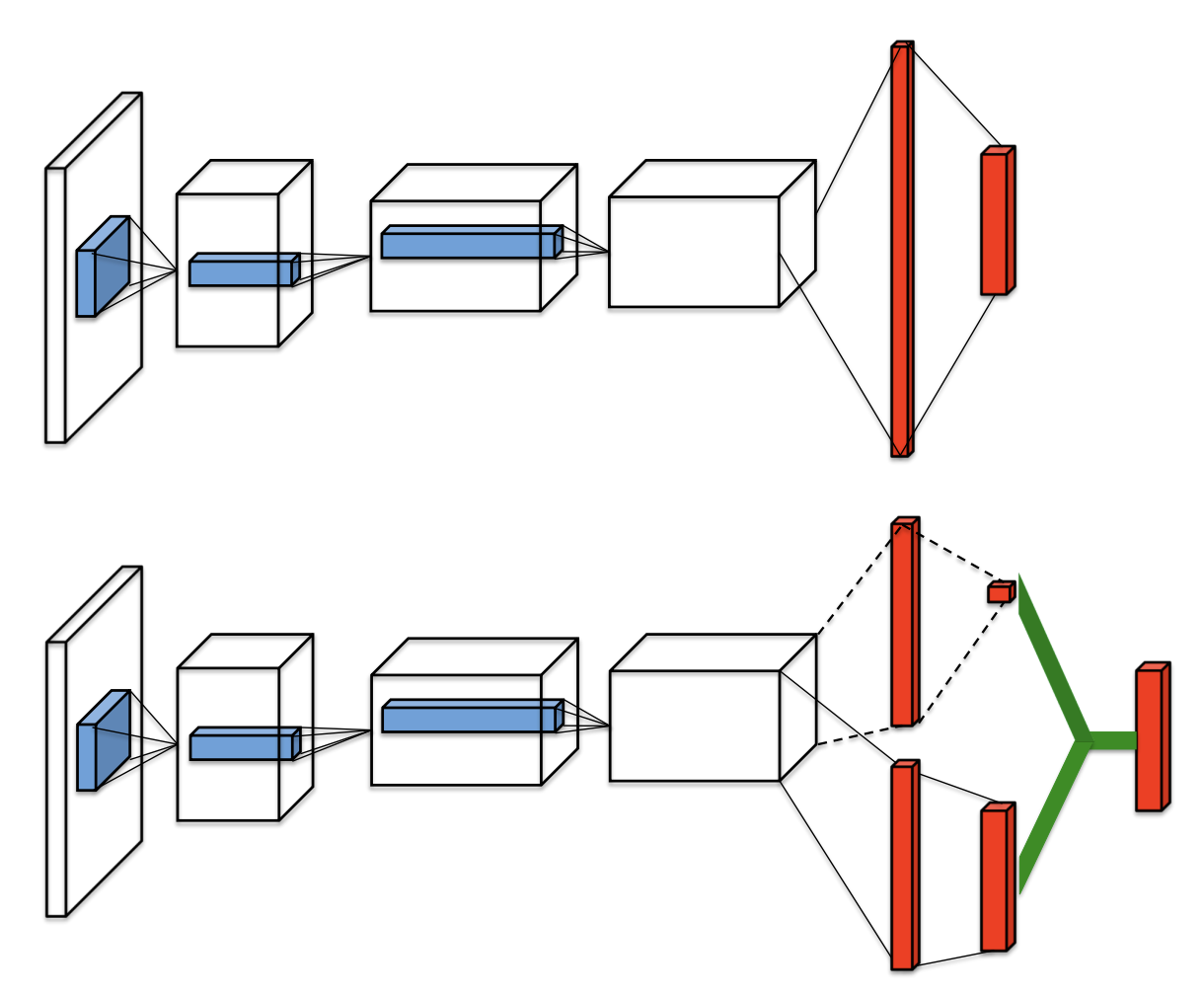
In Dueling Network Architectures for Deep Reinforcement Learning, dueling head architecture is utilized to implement the decomposition of state-value and advantage for taking each action, and use these two parts to construct the final q_value, which is better for evaluating the value of some states that show fewer connections with action selection.
The specific architecture is shown in the following graph:
In DI-engine, users can enable Dueling head by modifying the
duelingfield in the model part of the configuration file. The detailed code classDuelingHeadis located in Dueling Head.RNN (DRQN, R2D2)
For the combination of DQN and RNN, please refer to R2D2 in this series doc.
Implementations¶
The default config of DQNPolicy is defined as follows:
- class ding.policy.dqn.DQNPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]
- Overview:
Policy class of DQN algorithm, extended by Double DQN/Dueling DQN/PER/multi-step TD.
- Config:
ID
Symbol
Type
Default Value
Description
Other(Shape)
1
typestr
dqn
RL policy register name, refer toregistryPOLICY_REGISTRYThis arg is optional,a placeholder2
cudabool
False
Whether to use cuda for networkThis arg can be diff-erent from modes3
on_policybool
False
Whether the RL algorithm is on-policyor off-policy4
prioritybool
False
Whether use priority(PER)Priority sample,update priority5
priority_IS_weightbool
False
Whether use Importance SamplingWeight to correct biased update. IfTrue, priority must be True.6
discount_factorfloat
0.97, [0.95, 0.999]
Reward’s future discount factor, aka.gammaMay be 1 when sparsereward env7
nstepint
1, [3, 5]
N-step reward discount sum for targetq_value estimation8
model.duelingbool
True
dueling head architecture9
model.encoder_hidden_size_listlist (int)
[32, 64, 64, 128]
Sequence ofhidden_sizeofsubsequent conv layers and thefinal dense layer.default kernel_sizeis [8, 4, 3]default stride is[4, 2 ,1]10
model.dropoutfloat
None
Dropout rate for dropout layers.[0,1]If set toNonemeans no dropout11
learn.updateper_collectint
3
How many updates(iterations) to trainafter collector’s one collection.Only valid in serial trainingThis args can be varyfrom envs. Bigger valmeans more off-policy12
learn.batch_sizeint
64
The number of samples of an iteration13
learn.learning_ratefloat
0.001
Gradient step length of an iteration.14
learn.target_update_freqint
100
Frequence of target network update.Hard(assign) update15
learn.target_thetafloat
0.005
Frequence of target network update.Only one of [target_update_freq,target_theta] should be setSoft(assign) update16
learn.ignore_donebool
False
Whether ignore done for target valuecalculation.Enable it for somefake termination env17
collect.n_sampleint
[8, 128]
The number of training samples of acall of collector.It varies fromdifferent envs18
collect.n_episodeint
8
The number of training episodes of acall of collectoronly one of [n_sample,n_episode] shouldbe set19
collect.unroll_lenint
1
unroll length of an iterationIn RNN, unroll_len>120
other.eps.typestr
exp
exploration rate decay typeSupport [‘exp’,‘linear’].21
other.eps.startfloat
0.95
start value of exploration rate[0,1]22
other.eps.endfloat
0.1
end value of exploration rate[0,1]23
other.eps.decayint
10000
decay length of explorationgreater than 0. setdecay=10000 meansthe exploration ratedecay from startvalue to end valueduring decay length.
The network interface DQN used is defined as follows:
- class ding.model.template.q_learning.DQN(obs_shape: int | SequenceType, action_shape: int | SequenceType, encoder_hidden_size_list: SequenceType = [128, 128, 64], dueling: bool = True, head_hidden_size: int | None = None, head_layer_num: int = 1, activation: Module | None = ReLU(), norm_type: str | None = None, dropout: float | None = None, init_bias: float | None = None, noise: bool = False)[source]
- Overview:
The neural nework structure and computation graph of Deep Q Network (DQN) algorithm, which is the most classic value-based RL algorithm for discrete action. The DQN is composed of two parts:
encoderandhead. Theencoderis used to extract the feature from various observation, and theheadis used to compute the Q value of each action dimension.- Interfaces:
__init__,forward.
Note
Current
DQNsupports two types of encoder:FCEncoderandConvEncoder, two types of head:DiscreteHeadandDuelingHead. You can customize your own encoder or head by inheriting this class.- forward(x: Tensor) Dict[source]
- Overview:
DQN forward computation graph, input observation tensor to predict q_value.
- Arguments:
x (
torch.Tensor): The input observation tensor data.
- Returns:
outputs (
Dict): The output of DQN’s forward, including q_value.
- ReturnsKeys:
logit (
torch.Tensor): Discrete Q-value output of each possible action dimension.
- Shapes:
x (
torch.Tensor): \((B, N)\), where B is batch size and N isobs_shapelogit (
torch.Tensor): \((B, M)\), where B is batch size and M isaction_shape
- Examples:
>>> model = DQN(32, 6) # arguments: 'obs_shape' and 'action_shape' >>> inputs = torch.randn(4, 32) >>> outputs = model(inputs) >>> assert isinstance(outputs, dict) and outputs['logit'].shape == torch.Size([4, 6])
Note
For consistency and compatibility, we name all the outputs of the network which are related to action selections as
logit.
Benchmark¶
environment |
best mean reward |
evaluation results |
config link |
comparison |
|---|---|---|---|---|
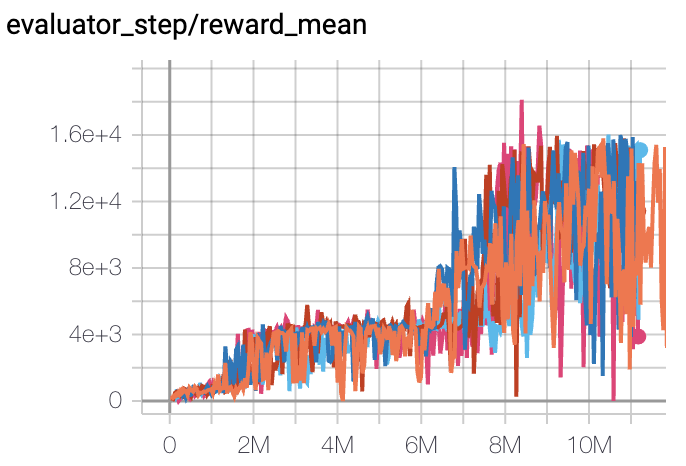
Pong
(PongNoFrameskip-v4)
|
20 |
|
Tianshou(20) Sb3(20)
|
|
Qbert
(QbertNoFrameskip-v4)
|
17966 |
|
Tianshou(7307) Rllib(7968) Sb3(9496)
|
|
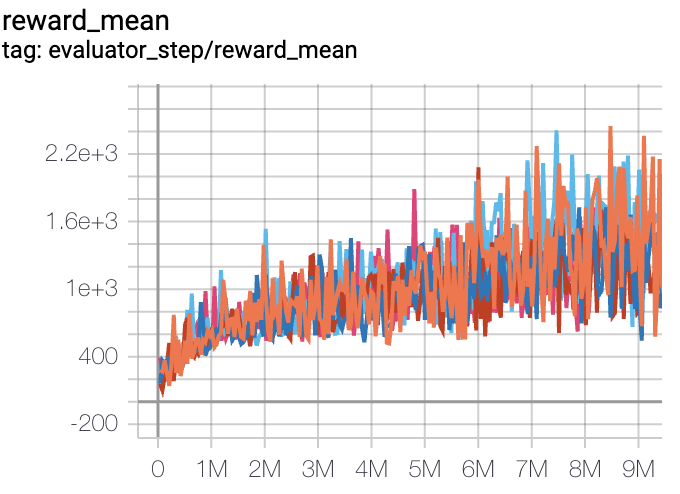
SpaceInvaders
(SpaceInvadersNoFrameskip-v4)
|
2403 |
|
Tianshou(812) Rllib(1001) Sb3(622)
|
P.S.:
The above results are obtained by running the same configuration on five different random seeds (0, 1, 2, 3, 4)
For the discrete action space algorithm like DQN, the Atari environment set is generally used for testing (including sub-environments Pong), and Atari environment is generally evaluated by the highest mean reward training 10M
env_step. For more details about Atari, please refer to Atari Env Tutorial .
Reference¶
Mnih, Volodymyr, et al. “Human-level control through deep reinforcement learning.” nature 518.7540 (2015): 529-533.
Wang, Z., Schaul, T., Hessel, M., Hasselt, H., Lanctot, M., & Freitas, N. (2016, June). Dueling network architectures for deep reinforcement learning. In International conference on machine learning (pp. 1995-2003). PMLR.
Van Hasselt, H., Guez, A., & Silver, D. (2016, March). Deep reinforcement learning with double q-learning. In Proceedings of the AAAI conference on artificial intelligence (Vol. 30, No. 1).
Schaul, T., Quan, J., Antonoglou, I., & Silver, D. (2015). Prioritized experience replay. arXiv preprint arXiv:1511.05952.