SAC¶
Overview¶
Soft actor-critic (SAC) is a stable and efficient model-free off-policy maximum entropy actor-critic algorithm for continuous state and action spaces, which is proposed in the 2018 paper Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor. The augmented entropy objective of the policy brings a number of conceptual and practical advantages including a more powerful exploration and the ability of the policy to capture multiple modes of near optimal behavior. The authors also showed that this method by combining off-policy updates with a stable stochastic actor-critic formulation, achieves state-of-the-art performance on a range of continuous control benchmark tasks, outperforming prior on-policy and off-policy methods.
Quick Facts¶
SAC is implemented for environments with continuous action spaces.(i.e. MuJoCo, Pendulum, and LunarLander)
SAC is an off-policy and model-free algorithm, combined with non-empty replay buffer for policy exploration.
SAC is a actor-critic RL algorithm, which optimizes actor network and critic network, respectively,
SAC is also implemented for multi-continuous action space.
Key Equations or Key Graphs¶
SAC considers a more general maximum entropy objective, which favors stochastic policies by augmenting the objective with the expected entropy of the policy:
The temperature parameters \(\alpha > 0\) controls the stochasticity of the optimal policy.
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor considers a parameterized state value function, soft Q-function, and a tractable policy. Specifically, the value function and the soft Q-function are modeled as expressive neural networks, and the policy as a Gaussian with mean and covariance given by neural networks. In particular, SAC applies the reparameterization trick instead of directly minimizing the expected KL-divergence for policy parameters as
We implement reparameterization trick through configuring learn.reparameterization.
Note
Compared with the vanilla version modeling state value function and soft Q-function, our implementation contains two versions. One is modeling state value function and soft Q-function, the other is only modeling soft Q-function through double network.
Note
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor considers a parameterized state value function, soft Q-function, and a tractable policy.
Our implementation contains two versions. One is modeling state value function and soft Q-function, the other is only modeling soft Q-function through double network.
We configure model.value_network, model.twin_q, and learn.learning_rate_value to switch implementation version.
Pseudocode¶
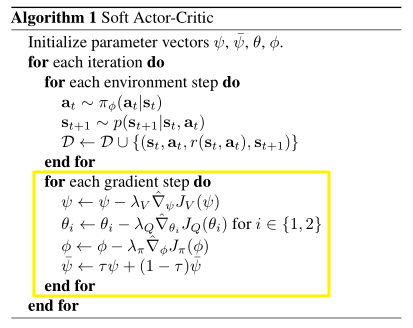
Note
Compared with the vanilla version, we only optimize q network and actor network in our second implementation version.
Extensions¶
SAC can be combined with:
Auto alpha strategy
Reinforcement Learning with Deep Energy-Based Policies proposes entropy coefficient \(\alpha\) used to determine the relative importance of entropy and reward. Extensive experiments conducted by Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor demonstrate Soft actor-critic is sensitive to reward scaling since it is related to the temperature of the optimal policy. The optimal reward scale varies between environments, and should be tuned for each task separately. Since we implement auto alpha strategy depending on maximum entropy through configuring
learn.is_auto_alphaandlearn.alpha.
Implementation¶
The default config is defined as follows:
- class ding.policy.sac.SACPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]¶
- Overview:
Policy class of continuous SAC algorithm. Paper link: https://arxiv.org/pdf/1801.01290.pdf
- Config:
ID
Symbol
Type
Default Value
Description
Other
1
typestr
sac
RL policy register name, referto registryPOLICY_REGISTRYthis arg is optional,a placeholder2
cudabool
True
Whether to use cuda for network3
on_policybool
False
SAC is an off-policyalgorithm.4
prioritybool
False
Whether to use prioritysampling in buffer.5
priority_IS_weightbool
False
Whether use Importance Samplingweight to correct biased update6
random_collect_sizeint
10000
Number of randomly collectedtraining samples in replaybuffer when training starts.Default to 10000 forSAC, 25000 for DDPG/TD3.7
learn.learning_rate_qfloat
3e-4
Learning rate for soft qnetwork.Defalut to 1e-38
learn.learning_rate_policyfloat
3e-4
Learning rate for policynetwork.Defalut to 1e-39
learn.alphafloat
0.2
Entropy regularizationcoefficient.alpha is initiali-zation for autoalpha, whenauto_alpha is True10
learn.auto_alphabool
False
Determine whether to useauto temperature parameteralpha.Temperature parameterdetermines therelative importanceof the entropy termagainst the reward.11
learn.-ignore_donebool
False
Determine whether to ignoredone flag.Use ignore_done onlyin env like Pendulum12
learn.-target_thetafloat
0.005
Used for soft update of thetarget network.aka. Interpolationfactor in polyak averaging for targetnetworks.
We take the second version implementation (only predict soft Q function) as an example to introduce SAC algorithm:
Basic Actor-Critic Definition
Initialization Model.
# build network
self._policy_net = PolicyNet(self._obs_shape, self._act_shape, self._policy_embedding_size)
self._twin_q = twin_q
if not self._twin_q:
self._soft_q_net = SoftQNet(self._obs_shape, self._act_shape, self._soft_q_embedding_size)
else:
self._soft_q_net = nn.ModuleList()
for i in range(2):
self._soft_q_net.append(SoftQNet(self._obs_shape, self._act_shape, self._soft_q_embedding_size))
Soft Q prediction from soft Q network
def compute_critic_q(self, inputs: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
action = inputs['action']
if len(action.shape) == 1:
action = action.unsqueeze(1)
state_action_input = torch.cat([inputs['obs'], action], dim=1)
q_value = self._soft_q_net_forward(state_action_input)
return {'q_value': q_value}
Action prediction from policy network
def compute_actor(self, obs: torch.Tensor, deterministic_eval=False, epsilon=1e-6) -> Dict[str, torch.Tensor]:
mean, log_std = self._policy_net_forward(obs)
std = log_std.exp()
# unbounded Gaussian as the action distribution.
dist = Independent(Normal(mean, std), 1)
# for reparameterization trick (mean + std * N(0,1))
if deterministic_eval:
x = mean
else:
x = dist.rsample()
y = torch.tanh(x)
action = y
# epsilon is used to avoid log of zero/negative number.
y = 1 - y.pow(2) + epsilon
log_prob = dist.log_prob(x).unsqueeze(-1)
log_prob = log_prob - torch.log(y).sum(-1, keepdim=True)
return {'mean': mean, 'log_std': log_std, 'action': action, 'log_prob': log_prob}
Note
SAC applys an invertible squashing function to the Gaussian samples, and employ the change of variables formula to compute the likelihoods of the bounded actions.
Specifically, we use unbounded Gaussian as the action distribution through Independent(Normal(mean, std), 1), which creates a diagonal Normal distribution with the same shape as a Multivariate Normal distribution.
This is equal to log_prob.sum(axis=-1).
Then, the action is squashed by \(\tanh(\text{mean})\), and the log-likelihood of action has a simple form \(\log \pi(\mathbf{a} \mid \mathbf{s})=\log \mu(\mathbf{u} \mid \mathbf{s})-\sum_{i=1}^{D} \log \left(1-\tanh ^{2}\left(u_{i}\right)\right)\).
In particular, the std in SAC is predicted from observation, which is different from PPO(learnable parameter) and TD3(heuristic parameter).
Entropy-Regularized Reinforcement Learning as follows
Entropy in target q value.
# target q value. SARSA: first predict next action, then calculate next q value
with torch.no_grad():
(mu, sigma) = self._learn_model.forward(next_obs, mode='compute_actor')['logit']
dist = Independent(Normal(mu, sigma), 1)
pred = dist.rsample()
next_action = torch.tanh(pred)
y = 1 - next_action.pow(2) + 1e-6
# keep dimension for loss computation (usually for action space is 1 env. e.g. pendulum)
next_log_prob = dist.log_prob(pred).unsqueeze(-1)
next_log_prob = next_log_prob - torch.log(y).sum(-1, keepdim=True)
next_data = {'obs': next_obs, 'action': next_action}
target_q_value = self._target_model.forward(next_data, mode='compute_critic')['q_value']
# the value of a policy according to the maximum entropy objective
if self._twin_critic:
# find min one as target q value
target_q_value = torch.min(target_q_value[0],
target_q_value[1]) - self._alpha * next_log_prob.squeeze(-1)
else:
target_q_value = target_q_value - self._alpha * next_log_prob.squeeze(-1)
Soft Q value network update.
# =================
# q network
# =================
# compute q loss
if self._twin_q:
q_data0 = v_1step_td_data(q_value[0], target_value, reward, done, data['weight'])
loss_dict['q_loss'], td_error_per_sample0 = v_1step_td_error(q_data0, self._gamma)
q_data1 = v_1step_td_data(q_value[1], target_value, reward, done, data['weight'])
loss_dict['q_twin_loss'], td_error_per_sample1 = v_1step_td_error(q_data1, self._gamma)
td_error_per_sample = (td_error_per_sample0 + td_error_per_sample1) / 2
else:
q_data = v_1step_td_data(q_value, target_value, reward, done, data['weight'])
loss_dict['q_loss'], td_error_per_sample = v_1step_td_error(q_data, self._gamma)
# update q network
self._optimizer_q.zero_grad()
loss_dict['q_loss'].backward()
if self._twin_q:
loss_dict['q_twin_loss'].backward()
self._optimizer_q.step()
Entropy in policy loss.
# compute policy loss
policy_loss = (self._alpha * log_prob - new_q_value.unsqueeze(-1)).mean()
loss_dict['policy_loss'] = policy_loss
# update policy network
self._optimizer_policy.zero_grad()
loss_dict['policy_loss'].backward()
self._optimizer_policy.step()
Note
We implement reparameterization trick trough \((\text{mean} + \text{std} * \mathcal{N}(0,1))\). In particular, the gradient back propagation for sigma is through log_prob in policy loss.
Auto alpha strategy
Alpha initialization through log action shape.
if self._cfg.learn.is_auto_alpha:
self._target_entropy = -np.prod(self._cfg.model.action_shape)
self._log_alpha = torch.log(torch.tensor([self._cfg.learn.alpha]))
self._log_alpha = self._log_alpha.to(device='cuda' if self._cuda else 'cpu').requires_grad_()
self._alpha_optim = torch.optim.Adam([self._log_alpha], lr=self._cfg.learn.learning_rate_alpha)
self._is_auto_alpha = True
assert self._log_alpha.shape == torch.Size([1]) and self._log_alpha.requires_grad
self._alpha = self._log_alpha.detach().exp()
Alpha update.
# compute alpha loss
if self._is_auto_alpha:
log_prob = log_prob.detach() + self._target_entropy
loss_dict['alpha_loss'] = -(self._log_alpha * log_prob).mean()
self._alpha_optim.zero_grad()
loss_dict['alpha_loss'].backward()
self._alpha_optim.step()
self._alpha = self._log_alpha.detach().exp()
Benchmark¶
environment |
best mean reward |
evaluation results |
config link |
comparison |
|---|---|---|---|---|
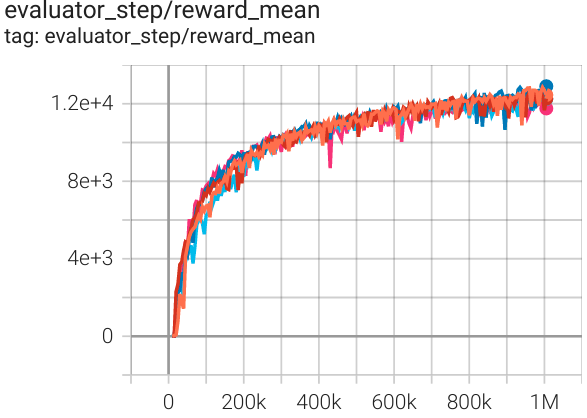
Halfcheetah (Halfcheetah-v3) |
12900 |
|
Spinning Up (13000) SB3(9535) Tianshou(12138) |
|
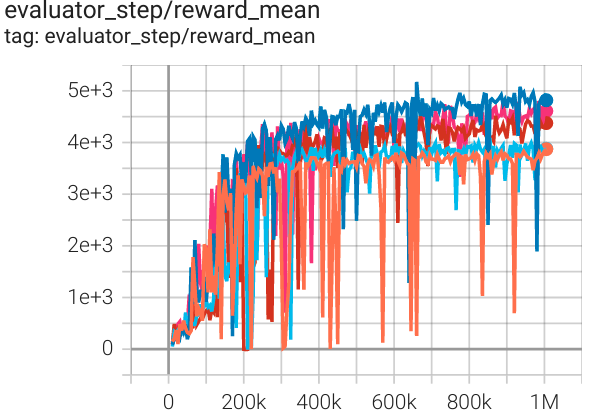
Walker2d (Walker2d-v2) |
5172 |
|
Spinning Up (5300) SB3(3863) Tianshou(5007) |
|
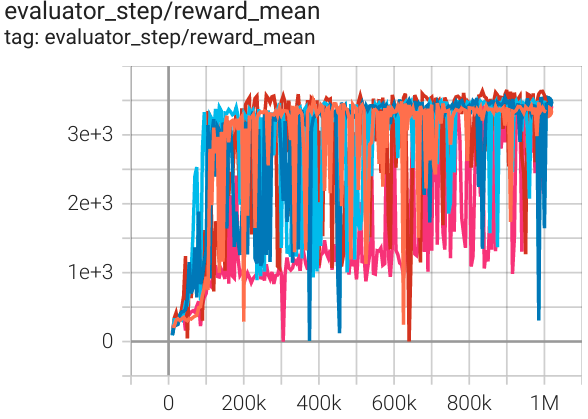
Hopper (Hopper-v2) |
3653 |
|
Spinning Up (3500) SB3(2325) Tianshou(3542) |
Reference¶
Haarnoja, et al. Soft Actor-Critic Algorithms and Applications. [https://arxiv.org/abs/1812.05905 arXiv:1812.05905], 2019.
Haarnoja, et al. Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor. [https://arxiv.org/abs/1801.01290 arXiv:1801.01290], 2018.