安全强化学习¶
问题定义和研究动机¶
安全强化学习 (Safe Reinforcement Learning),是强化学习的一个细分发展方向。强化学习的核心目标是学习一个最大化预期回报的策略,但是在现实世界的决策问题,例如自动驾驶和机器人场景中,部署这种仅最大化预期回报的智能体通常会引发安全问题。
在强化学习训练过程中通常会出现以下安全问题 [[1]]:
对环境的负面影响(Negative Side Effects)。
发掘奖励函数漏洞(Reward Hacking)。
信息有限时不采取错误动作(Scalable Oversight)。
安全地探索(Safe Exploration)。
对新环境或数据分布的安全性(Robustness to Distributional Shift)。
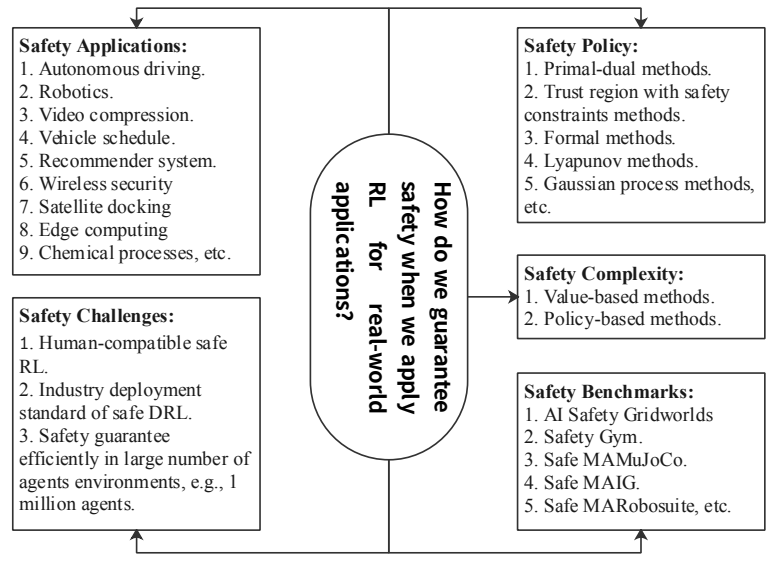
由于这些问题的存在,在实际部署时考虑安全条件时非常必要的。而在定义安全强化学习时有以下五个关键问题 [[2]]:
安全策略(Safety Policy)。如何进行策略优化,寻找安全的策略?
安全复杂性(Safety Complexity)。 需要多少训练数据才能找到安全的策略?
安全应用(Safety Applications)。 安全强化学习应用的最新进展如何?
安全基准(Safety Benchmarks)。 我们可以使用哪些基准来公平全面地检查安全强化学习性能?
安全挑战(Safety Challenges)。 未来安全强化学习研究面临哪些挑战?
一个从统一性角度概述这五个安全强化学习问题的框架如下图所示 [[2]]。
安全强化学习通常被建模为 约束马尔科夫决策过程 (Constrained Markov Decision Process,CMDP),约束马尔科夫决策过程是马尔科夫决策过程(MDP)的扩展,由七元组 \((S, A, P, r, c, b, \mu)\),即状态空间、动作空间、状态转移函数、奖励、代价、代价阈值、折扣因子组成。智能体采取动作后不仅会收到奖励 r 还会得到代价 c ,策略目标是在不超过代价阈值 b 的约束条件下最大化长期奖励:
\(\max_{\pi}\mathbb{E}_{\tau\sim\pi}\big[R(\tau)\big],\quad s.t.\quad\mathbb{E}_{\tau\sim\pi}\big[C(\tau)\big]\leq\kappa.\)
上图是 OpenAI 发布的 safety-gym 环境,传统强化学习训练出的最优策略往往以任务为中心,不考虑对环境和自身的影响、不会考虑是否符合人类预期等等。小车(红色)会以最快速度移动到目标地点(绿色圆柱体),完全没有避开地面的陷阱区域(蓝色圆圈),移动路径上如果有障碍物(青色立方体)则会撞开或强行从边缘擦过。
研究方向¶
安全强化学习的理论基础主要是对偶法和凸优化相关知识。主要的理论方法可以分为:
原问题对偶化(Primal Dual)方法,使用拉格朗日乘子法转换成解对偶问题。
原问题(Primal)方法,使用其他方式求解原问题。
而从训练方案上又可以分为:
无环境模型(Model-free)
基于环境模型(Model-based)
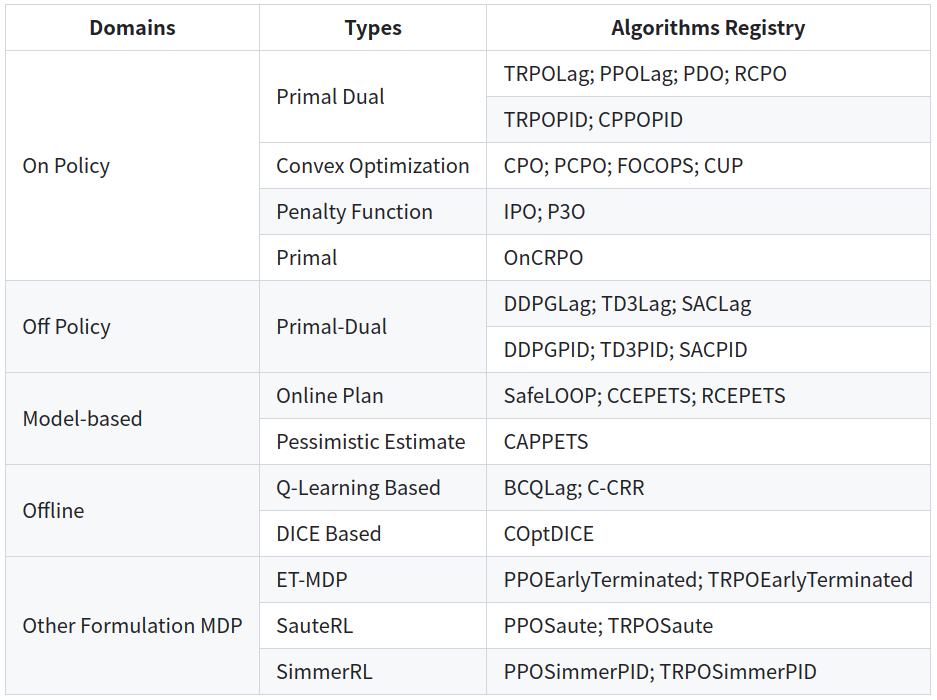
当前安全强化学习领域中算法的细致分类,可以参见下图(摘自 omnisafe ):
原问题对偶化(Primal Dual)¶
在 safe RL 的原问题中,目标和约束都不是凸的,但是可以使用拉格朗日乘子法转换成解对偶问题,对偶问题是极小化凸问题,是可以求解的,这种方案有很多经典工作 [[3, 4, 5, 6, 7]_]。
拉格朗日函数:\(\mathcal{L}(\pi,\lambda)=V(\pi)+\Sigma\lambda_i(U_i(\pi)-c_i),\lambda\geq0\)
拉格朗日对偶函数:\(d(\lambda)=\max_{\pi\in\mathcal{P}(\mathcal{S})}\mathcal{L}(\pi,\lambda)\)
最小化对偶函数:\(D^*=\min_{\lambda\in\mathbb{R}_+}d(\lambda)\) 就可以得到对偶问题最优解。
原问题(Primal)¶
使用对偶化方案虽然很好地保证了问题的可解性,但是训练迭代的速度很慢,在优化策略函数的同时还要优化对偶函数,同时在选择拉格朗日乘子时并不轻松。因此有些方法不直接关注整个原问题的求解,而去利用 Natural Policy Gradiants 中的单步更新公式:
在每一步更新时求解一个比较简单的单步约束优化问题,保证每一次更新都不违法约束并提升表现,自然最终会得到一个符合约束的解。代表方法是 PCPO 等。
无环境模型(Model-free)¶
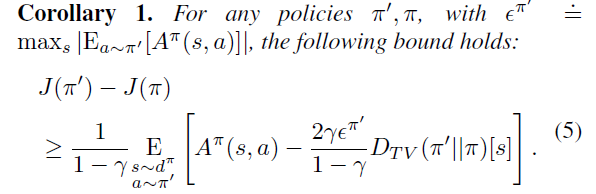
约束策略优化(CPO)[3]是第一个解决CMDP问题的策略梯度方法。优化以下两式就可以实现保证回报单调增加的同时满足安全约束。
\(J\left(\pi'\right)-J(\pi)\geq\frac{1}{1-\gamma}\underset{\stackrel{s\sim d\pi}{a\sim\pi'}}{\operatorname*{E}}\left[A^{\pi}(s,a)-\frac{2\gamma\epsilon^{\pi'}}{1-\gamma}D_{TV}\left(\pi'\|\pi\right)[s]\right]\)
\(J_{C_{i}}\left(\pi^{\prime}\right)-J_{C_{i}}\left(\pi\right)\leq\frac{1}{1-\gamma}\underset{\overset{s\sim d^{\pi}}{a\sim\pi^{\prime}}}{\operatorname*{E}}\left[A_{C_{i}}^{\pi}\left(s,a\right)+\frac{2\gamma\epsilon_{C_{i}}^{\pi^{\prime}}}{1-\gamma}D_{TV}\left(\pi^{\prime}\|\pi\right)\left[s\right]\right]\)
这一方法几乎可以收敛到安全界限,并在某些任务上产生比原始对偶方法更好的性能。然而,CPO 的计算代价比拉格朗日乘子法更昂贵,因为它需要计算 Fisher 信息矩阵并使用二次泰勒展开来优化目标。
基于环境模型(Model-based)¶
基于模型的深度强化学习 (DRL) 方法通常比无模型的 DRL 方法具有更好的学习效率,在安全强化学习领域同样是如此。但在现实情况下,构建准确的环境模型是具有挑战性的,许多模拟环境难以构建模型来辅助深度强化学习方法的部署。
未来展望¶
当我们在实际应用中利用强化学习时,部署过程中会遇到许多挑战。安全强化学习是一个发展时间并不太久的方向,很多方面都有许多需要探索之处 [[8, 9, 10]_]。比如:
利用博弈论实现安全多智能体强化学习(safe-MARL)。可以在不同的游戏设置中考虑不同的游戏用于现实世界的应用。
基于信息论的安全强化学习。信息论可能有助于处理不确定性奖励信号和成本估计,并有效解决大规模多智能体环境的问题。
利用人脑理论和生物学理论。从生物学定律中汲取一些灵感来设计安全的强化学习算法。
人机交互。从与非专家用户的互动中学习,建模人类行为和现实交互,使机器人安全地继承人类偏好并更多地了解人类的潜在解决方案。