DDPG¶
Overview¶
Deep Deterministic Policy Gradient (DDPG), proposed in the 2015 paper Continuous control with deep reinforcement learning, is an algorithm which learns a Q-function and a policy simultaneously. DDPG is an actor-critic, model-free algorithm based on the deterministic policy gradient(DPG) that can operate over high-dimensional, continuous action spaces. DPG Deterministic policy gradient algorithms algorithm is similar to NFQCA Reinforcement learning in feedback control.
Quick Facts¶
DDPG is only used for environments with continuous action spaces (e.g. MuJoCo).
DDPG is an off-policy algorithm.
DDPG is a model-free and actor-critic RL algorithm, which optimizes the actor network and the critic network, respectively.
Usually, DDPG use Ornstein-Uhlenbeck process or Gaussian process (default in our implementation) for exploration.
Key Equations or Key Graphs¶
The DDPG algorithm maintains a parameterized actor function \(\mu\left(s \mid \theta^{\mu}\right)\) which specifies the current policy by deterministically mapping states to a specific action. The critic \(Q(s, a)\) is learned using the Bellman equation as in Q-learning.
The actor is updated by following the applying the chain rule to the expected return from the start distribution \(J\) with respect to the actor parameters.
Specifically, to maximize the expected payoff \(J\), the algorithm needs to compute the gradient of \(J\) on the policy function argument \(\theta^{\mu}\). \(J\) is \(Q (s, a)\) expectations, so the problem is transformed into computing \(Q^{\mu} (s, \mu(s))\) to \(\theta^{\mu}\) gradient.
According to the chain rule, \(\nabla_{\theta^{\mu}} Q^{\mu}(s, \mu(s)) = \nabla_{\theta^{\mu}}\mu(s)\nabla_{a}Q^\mu(s,a)|_{ a=\mu\left(s\right)}+\nabla_{\theta^{\mu}} Q^{\mu}(s, a)|_{ a=\mu\left(s\right)}\).
Similar to the derivation of off-policy stochastic policy gradient from Off-Policy Actor-Critic, Deterministic policy gradient algorithms dropped the second term. Thus, the approximate deterministic policy gradient theorem is obtained:
DDPG uses a replay buffer to guarantee that the samples are independently and identically distributed.
To keep neural networks stable in many environments, DDPG uses “soft” target updates to update target networks rather than directly copying the weights. Specifically, DDPG creates a copy of the actor and critic networks, \(Q'(s, a|\theta^{Q'})\) and \(\mu' \left(s \mid \theta^{\mu'}\right)\) respectively, that are used for calculating the target values. The weights of these target networks are then updated by having them slowly track the learned networks:
where \(\tau<<1\). This means that the target values are constrained to change slowly, greatly improving the stability of learning.
A major challenge of learning in continuous action spaces is exploration. However, it is an advantage for off-policies algorithms such as DDPG that the problem of exploration could be treated independently from the learning algorithm. Specifically, we constructed an exploration policy by adding noise sampled from a noise process N to actor policy:
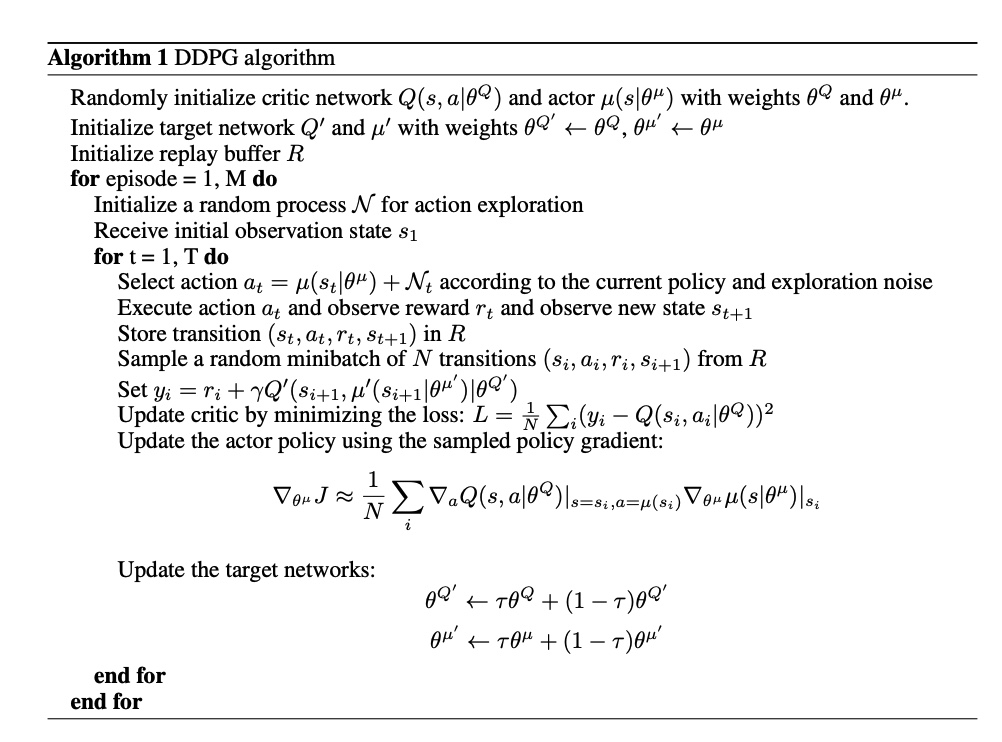
Pseudocode¶
Extensions¶
- DDPG can be combined with:
Target Network
Continuous control with deep reinforcement learning proposes soft target updates used to keep the network training stable. Since we implement soft update Target Network for actor-critic through
TargetNetworkWrapperinmodel_wrapand configuringlearn.target_theta.Initial collection of replay buffer following random policy
Before optimizing the model parameters, we need to have a sufficient number of transition data in the replay buffer following random policy to ensure that the model does not overfit the replay buffer data at the beginning of the algorithm. So we control the number of transitions in the initial replay buffer by configuring
random_collect_size. DDPG/TD3random_collect_sizeis set to 25000 by default, while it is 10000 for SAC. We only simply follow SpinningUp default setting and use random policy to collect initialization data.Gaussian noise during collecting transition
For the exploration noise process DDPG uses temporally correlated noise in order to generate temporally correlated exploration for exploration efficiency in physical control problems with inertia. Specifically, DDPG uses Ornstein-Uhlenbeck process with \(\theta = 0.15\) and \(\sigma = 0.2\). The Ornstein-Uhlenbeck process models the velocity of a Brownian particle with friction, which results in temporally correlated values centered around 0. However, we use Gaussian noise instead of Ornstein-Uhlenbeck noise due to too many hyper-parameters of Ornstein-Uhlenbeck noise. We configure
collect.noise_sigmato control the exploration.
Implementations¶
The default config is defined as follows:
- class ding.policy.ddpg.DDPGPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]
- Overview:
Policy class of DDPG algorithm. Paper link: https://arxiv.org/abs/1509.02971.
- Config:
ID
Symbol
Type
Default Value
Description
Other(Shape)
1
typestr
ddpg
RL policy register name, referto registryPOLICY_REGISTRYthis arg is optional,a placeholder2
cudabool
False
Whether to use cuda for network3
random_collect_sizeint
25000
Number of randomly collectedtraining samples in replaybuffer when training starts.Default to 25000 forDDPG/TD3, 10000 forsac.4
model.twin_criticbool
False
Whether to use two criticnetworks or only one.Default False forDDPG, Clipped DoubleQ-learning method inTD3 paper.5
learn.learning_rate_actorfloat
1e-3
Learning rate for actornetwork(aka. policy).6
learn.learning_rate_criticfloat
1e-3
Learning rates for criticnetwork (aka. Q-network).7
learn.actor_update_freqint
2
When critic network updatesonce, how many times will actornetwork update.Default 1 for DDPG,2 for TD3. DelayedPolicy Updates methodin TD3 paper.8
learn.noisebool
False
Whether to add noise on targetnetwork’s action.Default False forDDPG, True for TD3.Target Policy Smoo-thing Regularizationin TD3 paper.9
learn.-ignore_donebool
False
Determine whether to ignoredone flag.Use ignore_done onlyin halfcheetah env.10
learn.-target_thetafloat
0.005
Used for soft update of thetarget network.aka. Interpolationfactor in polyak aver-aging for targetnetworks.11
collect.-noise_sigmafloat
0.1
Used for add noise during co-llection, through controllingthe sigma of distributionSample noise from dis-tribution, Ornstein-Uhlenbeck process inDDPG paper, Gaussianprocess in ours.
Model¶
Here we provide examples of ContinuousQAC model as default model for DDPG.
- class ding.model.ContinuousQAC(obs_shape: int | SequenceType, action_shape: int | SequenceType | EasyDict, action_space: str, twin_critic: bool = False, actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Module | None = ReLU(), norm_type: str | None = None, encoder_hidden_size_list: SequenceType | None = None, share_encoder: bool | None = False)[source]
- Overview:
The neural network and computation graph of algorithms related to Q-value Actor-Critic (QAC), such as DDPG/TD3/SAC. This model now supports continuous and hybrid action space. The ContinuousQAC is composed of four parts:
actor_encoder,critic_encoder,actor_headandcritic_head. Encoders are used to extract the feature from various observation. Heads are used to predict corresponding Q-value or action logit. In high-dimensional observation space like 2D image, we often use a shared encoder for bothactor_encoderandcritic_encoder. In low-dimensional observation space like 1D vector, we often use different encoders.- Interfaces:
__init__,forward,compute_actor,compute_critic
- compute_actor(obs: Tensor) Dict[str, Tensor | Dict[str, Tensor]][source]
- Overview:
QAC forward computation graph for actor part, input observation tensor to predict action or action logit.
- Arguments:
x (
torch.Tensor): The input observation tensor data.
- Returns:
outputs (
Dict[str, Union[torch.Tensor, Dict[str, torch.Tensor]]]): Actor output dict varying from action_space:regression,reparameterization,hybrid.
- ReturnsKeys (regression):
action (
torch.Tensor): Continuous action with same size asaction_shape, usually in DDPG/TD3.
- ReturnsKeys (reparameterization):
logit (
Dict[str, torch.Tensor]): The predictd reparameterization action logit, usually in SAC. It is a list containing two tensors:muandsigma. The former is the mean of the gaussian distribution, the latter is the standard deviation of the gaussian distribution.
- ReturnsKeys (hybrid):
logit (
torch.Tensor): The predicted discrete action type logit, it will be the same dimension asaction_type_shape, i.e., all the possible discrete action types.action_args (
torch.Tensor): Continuous action arguments with same size asaction_args_shape.
- Shapes:
obs (
torch.Tensor): \((B, N0)\), B is batch size and N0 corresponds toobs_shape.action (
torch.Tensor): \((B, N1)\), B is batch size and N1 corresponds toaction_shape.logit.mu (
torch.Tensor): \((B, N1)\), B is batch size and N1 corresponds toaction_shape.logit.sigma (
torch.Tensor): \((B, N1)\), B is batch size.logit (
torch.Tensor): \((B, N2)\), B is batch size and N2 corresponds toaction_shape.action_type_shape.action_args (
torch.Tensor): \((B, N3)\), B is batch size and N3 corresponds toaction_shape.action_args_shape.
- Examples:
>>> # Regression mode >>> model = ContinuousQAC(64, 6, 'regression') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 6]) >>> # Reparameterization Mode >>> model = ContinuousQAC(64, 6, 'reparameterization') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['logit'][0].shape == torch.Size([4, 6]) # mu >>> actor_outputs['logit'][1].shape == torch.Size([4, 6]) # sigma
- compute_critic(inputs: Dict[str, Tensor]) Dict[str, Tensor][source]
- Overview:
QAC forward computation graph for critic part, input observation and action tensor to predict Q-value.
- Arguments:
inputs (
Dict[str, torch.Tensor]): The dict of input data, includingobsandactiontensor, also containslogitandaction_argstensor in hybrid action_space.
- ArgumentsKeys:
obs: (
torch.Tensor): Observation tensor data, now supports a batch of 1-dim vector data.action (
Union[torch.Tensor, Dict]): Continuous action with same size asaction_shape.logit (
torch.Tensor): Discrete action logit, only in hybrid action_space.action_args (
torch.Tensor): Continuous action arguments, only in hybrid action_space.
- Returns:
outputs (
Dict[str, torch.Tensor]): The output dict of QAC’s forward computation graph for critic, includingq_value.
- ReturnKeys:
q_value (
torch.Tensor): Q value tensor with same size as batch size.
- Shapes:
obs (
torch.Tensor): \((B, N1)\), where B is batch size and N1 isobs_shape.logit (
torch.Tensor): \((B, N2)\), B is batch size and N2 corresponds toaction_shape.action_type_shape.action_args (
torch.Tensor): \((B, N3)\), B is batch size and N3 corresponds toaction_shape.action_args_shape.action (
torch.Tensor): \((B, N4)\), where B is batch size and N4 isaction_shape.q_value (
torch.Tensor): \((B, )\), where B is batch size.
- Examples:
>>> inputs = {'obs': torch.randn(4, 8), 'action': torch.randn(4, 1)} >>> model = ContinuousQAC(obs_shape=(8, ),action_shape=1, action_space='regression') >>> assert model(inputs, mode='compute_critic')['q_value'].shape == (4, ) # q value
- forward(inputs: Tensor | Dict[str, Tensor], mode: str) Dict[str, Tensor][source]
- Overview:
QAC forward computation graph, input observation tensor to predict Q-value or action logit. Different
modewill forward with different network modules to get different outputs and save computation.- Arguments:
inputs (
Union[torch.Tensor, Dict[str, torch.Tensor]]): The input data for forward computation graph, forcompute_actor, it is the observation tensor, forcompute_critic, it is the dict data including obs and action tensor.mode (
str): The forward mode, all the modes are defined in the beginning of this class.
- Returns:
output (
Dict[str, torch.Tensor]): The output dict of QAC forward computation graph, whose key-values vary in different forward modes.
- Examples (Actor):
>>> # Regression mode >>> model = ContinuousQAC(64, 6, 'regression') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 6]) >>> # Reparameterization Mode >>> model = ContinuousQAC(64, 6, 'reparameterization') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['logit'][0].shape == torch.Size([4, 6]) # mu >>> actor_outputs['logit'][1].shape == torch.Size([4, 6]) # sigma
- Examples (Critic):
>>> inputs = {'obs': torch.randn(4, 8), 'action': torch.randn(4, 1)} >>> model = ContinuousQAC(obs_shape=(8, ),action_shape=1, action_space='regression') >>> assert model(inputs, mode='compute_critic')['q_value'].shape == (4, ) # q value
Train actor-critic model¶
First, we initialize actor and critic optimizer in _init_learn, respectively.
Setting up two separate optimizers can guarantee that we only update actor network parameters and not critic network when we compute actor loss, vice versa.
# actor and critic optimizer self._optimizer_actor = Adam( self._model.actor.parameters(), lr=self._cfg.learn.learning_rate_actor, weight_decay=self._cfg.learn.weight_decay ) self._optimizer_critic = Adam( self._model.critic.parameters(), lr=self._cfg.learn.learning_rate_critic, weight_decay=self._cfg.learn.weight_decay )
- In
_forward_learnwe update actor-critic policy through computing critic loss, updating critic network, computing actor loss, and updating actor network. critic loss computationcurrent and target value computation
# current q value q_value = self._learn_model.forward(data, mode='compute_critic')['q_value'] # target q value. SARSA: first predict next action, then calculate next q value with torch.no_grad(): next_action = self._target_model.forward(next_obs, mode='compute_actor')['action'] next_data = {'obs': next_obs, 'action': next_action} target_q_value = self._target_model.forward(next_data, mode='compute_critic')['q_value']
loss computation
# DDPG: single critic network td_data = v_1step_td_data(q_value, target_q_value, reward, data['done'], data['weight']) critic_loss, td_error_per_sample = v_1step_td_error(td_data, self._gamma) loss_dict['critic_loss'] = critic_loss
critic network update
self._optimizer_critic.zero_grad() loss_dict['critic_loss'].backward() self._optimizer_critic.step()
actor loss
actor_data = self._learn_model.forward(data['obs'], mode='compute_actor') actor_data['obs'] = data['obs'] actor_loss = -self._learn_model.forward(actor_data, mode='compute_critic')['q_value'].mean() loss_dict['actor_loss'] = actor_loss
actor network update
# actor update self._optimizer_actor.zero_grad() actor_loss.backward() self._optimizer_actor.step()
Target Network¶
We implement Target Network trough target model initialization in _init_learn.
We configure learn.target_theta to control the interpolation factor in averaging.
# main and target models
self._target_model = copy.deepcopy(self._model)
self._target_model = model_wrap(
self._target_model,
wrapper_name='target',
update_type='momentum',
update_kwargs={'theta': self._cfg.learn.target_theta}
)
Benchmark¶
environment |
best mean reward |
evaluation results |
config link |
comparison |
|---|---|---|---|---|
HalfCheetah (HalfCheetah-v3) |
11334 |
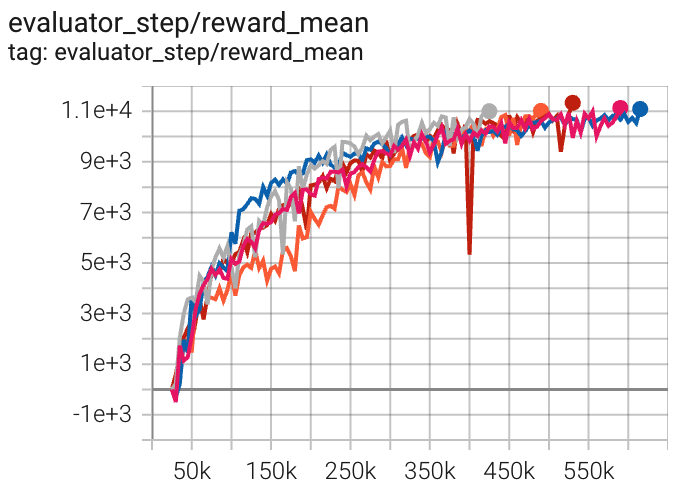
|
Tianshou(11719) Spinning-up(11000) |
|
Hopper (Hopper-v2) |
3516 |
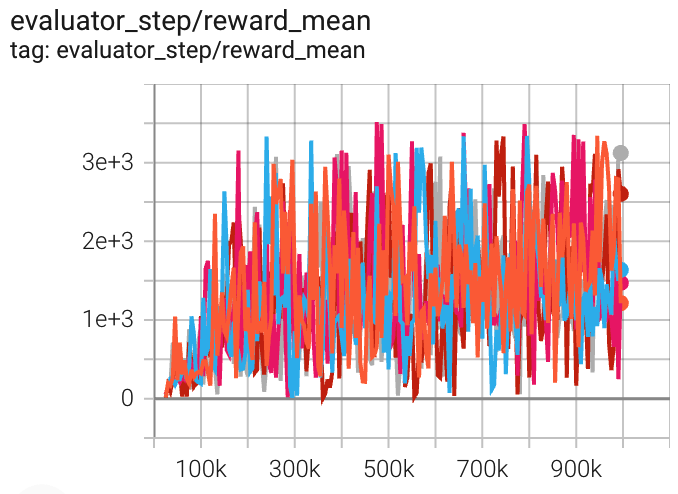
|
Tianshou(2197) Spinning-up(1800) |
|
Walker2d (Walker2d-v2) |
3443 |
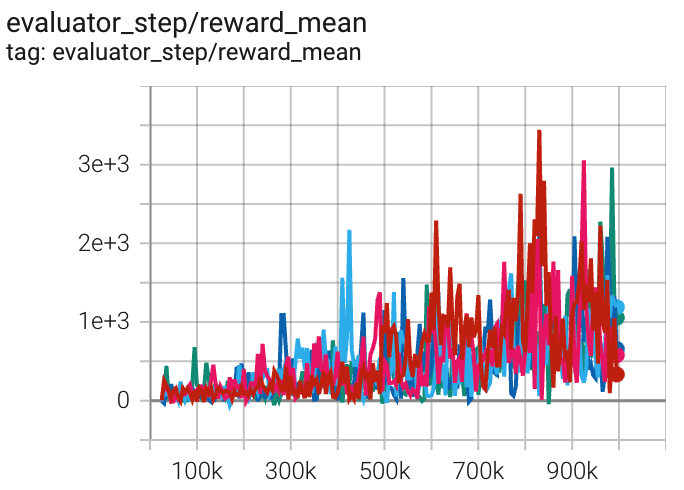
|
Tianshou(1401) Spinning-up(1950) |
P.S.:
The above results are obtained by running the same configuration on five different random seeds (0, 1, 2, 3, 4)
References¶
Timothy P. Lillicrap, Jonathan J. Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, Daan Wierstra: “Continuous control with deep reinforcement learning”, 2015; [http://arxiv.org/abs/1509.02971 arXiv:1509.02971].
David Silver, Guy Lever, Nicolas Heess, Thomas Degris, Daan Wierstra, et al.. Deterministic Policy Gradient Algorithms. ICML, Jun 2014, Beijing, China. ffhal-00938992f
Hafner, R., Riedmiller, M. Reinforcement learning in feedback control. Mach Learn 84, 137–169 (2011).
Degris, T., White, M., and Sutton, R. S. (2012b). Linear off-policy actor-critic. In 29th International Conference on Machine Learning.