from Continuous Intention to Continuous Trajectory¶
from Continuous Intention to Continuous Trajectory(CICT) is a hierarchical Imitation Learning method for close-loop autonomous driving. It uses a generator network to obtain potential map from RGB camera and LiDAR inputs, and then uses a trajectory function network to generate a detailed trajectory together with the placement.
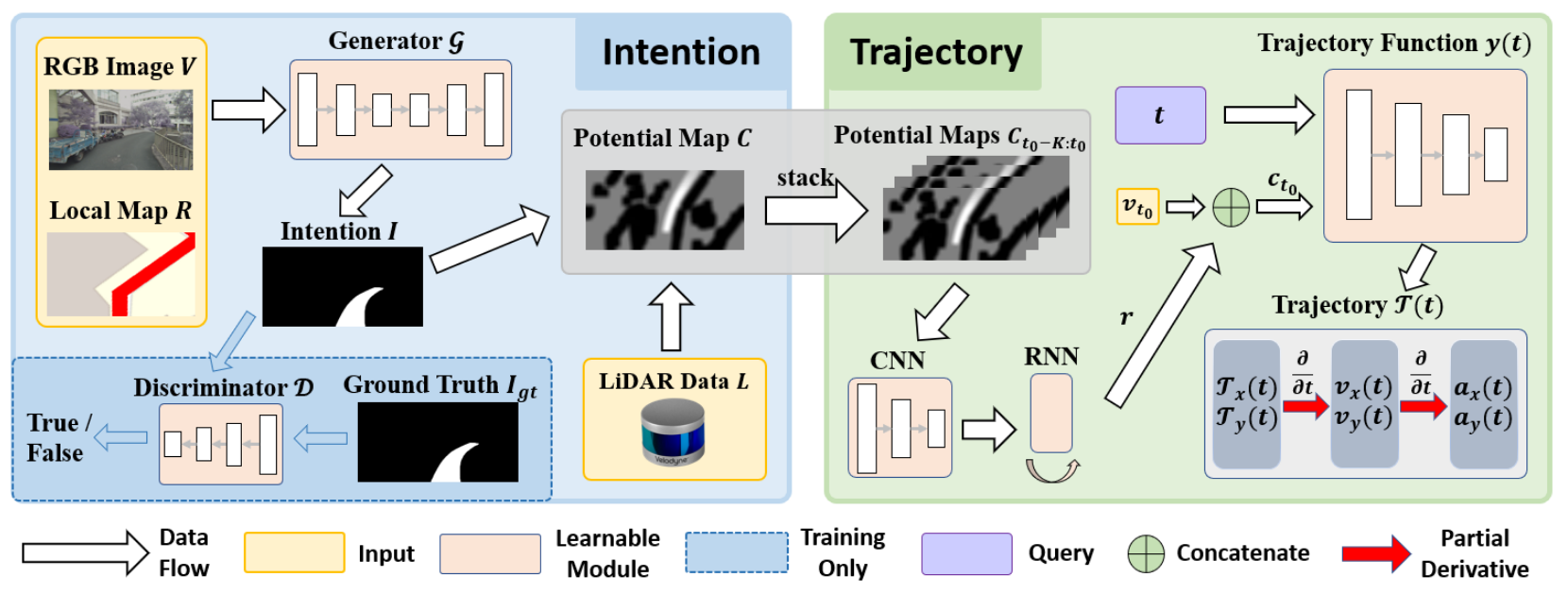
DI-drive prepares training and evaluation for the GAN network and trajectory network in CICT. The IL datasets is colleted via Carla. The close-loop control test is supported using the two trained networks.
Data Preparation¶
The collection settings can be modified in demo/cict_demo/post.py. By default we collect 40
episodes in total, 37 for training and 3 for evaluation.
You may need to change the environment num, episode num, server ip and port and dataset path
in default config before running.
Default settings:
config = dict(
env=dict(
env_num=5,
simulator=dict(
disable_two_wheels=True,
waypoint_num=32,
planner=dict(
type='behavior',
resolution=1,
),
obs=(
dict(
name='rgb',
type='rgb',
size=[640, 360],
position=[0.5, 0.0, 2.5],
rotation=[0, 0, 0],
sensor_tick=1. / 30,
),
dict(
name='lidar',
type='lidar',
channels=64,
range=50,
points_per_second=100000,
rotation_frequency=30,
upper_fov=10,
lower_fov=-30,
position=[0.5, 0.0, 2.5],
rotation=[0, 0, 0],
sensor_tick=0.05,
)
),
verbose=True,
),
col_is_failure=True,
stuck_is_failure=True,
manager=dict(
auto_reset=False,
shared_memory=False,
context='spawn',
max_retry=1,
),
wrapper=dict(suite='FullTown01-v3', ),
),
server=[
dict(carla_host='localhost', carla_ports=[9000, 9010, 2]),
],
policy=dict(
target_speed=25,
noise=False,
collect=dict(
n_episode=5,
dir_path='datasets/cict_datasets_train',
npy_prefix='_preloads',
collector=dict(suite='FullTown01-v3', ),
),
),
)
Collecting and post processing:
python collect_data.py
Training¶
CICT is a two-stage method. cict_train_GAN.py and cict_train_traj.py are used for training of each stage.
You may need to change the dataset path and pre-train model path.
Default Configuration of the first stage:
train_config = dict(
NUMBER_OF_LOADING_WORKERS=4,
IMG_HEIGHT=128,
IMG_WIDTH=256,
SENSORS=dict(rgb=[3, 360, 640]),
DEST=0, #choose bird-view destination (0) or camera-view destination (1)
START_EPISODE=0, #set which episodes for training
END_EPISODE=37,
BATCH_SIZE=32,
COMMON=dict(
folder='sample', exp='cict_GAN', dataset_path='datasets'
),
GPU='0',
SAVE_INTERVAL=1000,
MAX_CKPT_SAVE_NUM=40,
N_EPOCHS=60,
SPEED_FACTOR=25.0,
TRAIN_DATASET_NAME='cict_datasets_train',
MODEL_TYPE='cict_GAN',
PREFIX='_preloads',
UNPAIRED=False,
GAN=False,
MODEL_CONFIGURATION=dict(
generator=dict(
down_channels=[6, 64, 128, 256, 512, 512, 512, 512],
up_channels=[0, 512, 512, 512, 256, 128, 64],
kernel_size=4,
stride=2,
padding=1,
down_norm=[False, True, True, True, True, True, False],
up_norm=[True, True, True, True, True, True],
down_dropout=[0, 0, 0, 0.5, 0.5, 0.5, 0.5],
up_dropout=[0.5, 0.5, 0.5, 0, 0, 0],
final_channels=1,
num_branches=1,
),
discriminator=dict(
channels=[7, 64, 128, 256, 512],
kernel_size=4,
stride=2,
padding=1,
norm=[False, True, True, True],
dropout=[0, 0, 0, 0]
)
),
PRE_TRAINED=False,
LEARNING_RATE=0.0003,
BETA1=0.5,
BETA2=0.999,
GAN_LOSS_FUNCTION='MSE',
PIXEL_LOSS_FUNCTION='L1',
PIXEL_LOSS_WEIGHT=2,
PRELOAD_MODEL_ALIAS=None,
PRELOAD_MODEL_BATCH=None,
PRELOAD_MODEL_CHECKPOINT=None,
REMOVE=None,
)
Training the first stage:
python cict_train_GAN.py
Default Configuration of the second stage:
train_config = dict(
NUMBER_OF_LOADING_WORKERS=4,
IMG_HEIGHT=200,
IMG_WIDTH=400,
MAX_DIST=25.,
MAX_T=1,
IMG_STEP=1,
PRED_LEN=10,
START_EPISODE=0,
END_EPISODE=37,
BATCH_SIZE=64,
COMMON=dict(
folder='sample', exp='cict_traj', dataset_path='datasets'
),
GPU='0',
EVAL=False,
SAVE_INTERVAL=1000,
MAX_CKPT_SAVE_NUM=40,
N_EPOCHS=80,
SPEED_FACTOR=25.0,
TRAIN_DATASET_NAME='cict_datasets_train',
MODEL_TYPE='cict_traj',
PREFIX='_preloads',
MODEL_CONFIGURATION=dict(
input_dim=1,
hidden_dim=256,
out_dim=2
),
PRE_TRAINED=False,
LEARNING_RATE=3e-4,
WEIGHT_DECAY=5e-4,
VELOCITY_LOSS_WEIGHT=1,
ACCELERATION_LOSS_WEIGHT=0.1,
PRELOAD_MODEL_ALIAS=None,
PRELOAD_MODEL_BATCH=None,
PRELOAD_MODEL_CHECKPOINT=None,
REMOVE=None,
)
Training the second stage:
python cict_train_traj.py
Evaluation¶
cict_eval_GAN.py and cict_eval_traj.py are used for training of each stage.
Note that you must evaluate the first stage before evaluate the second stage.
Also you may need to change the dataset path and pre-train weights path.
Default configuration of the first stage:
eval_config = dict(
NUMBER_OF_LOADING_WORKERS=1,
IMG_HEIGHT=128,
IMG_WIDTH=256,
SENSORS=dict(rgb=[3, 360, 640]),
DEST=0,
START_EPISODE=37,
END_EPISODE=40,
BATCH_SIZE=1,
COMMON=dict(
folder='sample', exp='cict_GAN', dataset_path='datasets'
),
GPU='0',
TRAIN_DATASET_NAME='cict_datasets_train',
MODEL_TYPE='cict_GAN',
PREFIX='_preloads',
UNPAIRED=False,
MODEL_CONFIGURATION=dict(
generator=dict(
down_channels=[6, 64, 128, 256, 512, 512, 512, 512],
up_channels=[0, 512, 512, 512, 256, 128, 64],
kernel_size=4,
stride=2,
padding=1,
down_norm=[False, True, True, True, True, True, False],
up_norm=[True, True, True, True, True, True],
down_dropout=[0, 0, 0, 0.5, 0.5, 0.5, 0.5],
up_dropout=[0.5, 0.5, 0.5, 0, 0, 0],
final_channels=1,
num_branches=1,
)
),
GAN_LOSS_FUNCTION='MSE',
PIXEL_LOSS_FUNCTION='L1',
PRELOAD_MODEL_ALIAS=None,
PRELOAD_MODEL_BATCH=None,
PRELOAD_MODEL_CHECKPOINT=None,
REMOVE=None,
)
Evaluating the first stage:
python cict_eval_GAN.py
Default configuration of the second stage:
eval_config = dict(
NUMBER_OF_LOADING_WORKERS=1,
IMG_HEIGHT=200,
IMG_WIDTH=400,
MAX_DIST=25.,
MAX_T=1,
IMG_STEP=1,
START_EPISODE=37,
END_EPISODE=40,
BATCH_SIZE=1,
PRED_LEN=10,
COMMON=dict(
folder='sample', exp='cict_traj', dataset_path='datasets'
),
GPU='0',
SPEED_FACTOR=25.0,
TRAIN_DATASET_NAME='cict_datasets_train',
MODEL_TYPE='cict_traj',
PREFIX='_preloads',
EVAL=True,
MODEL_CONFIGURATION=dict(
input_dim=1,
hidden_dim=256,
out_dim=2
),
PRELOAD_MODEL_ALIAS=None,
PRELOAD_MODEL_BATCH=None,
PRELOAD_MODEL_CHECKPOINT=None,
REMOVE=None,
)
Evaluating the second stage:
python cict_eval_traj.py
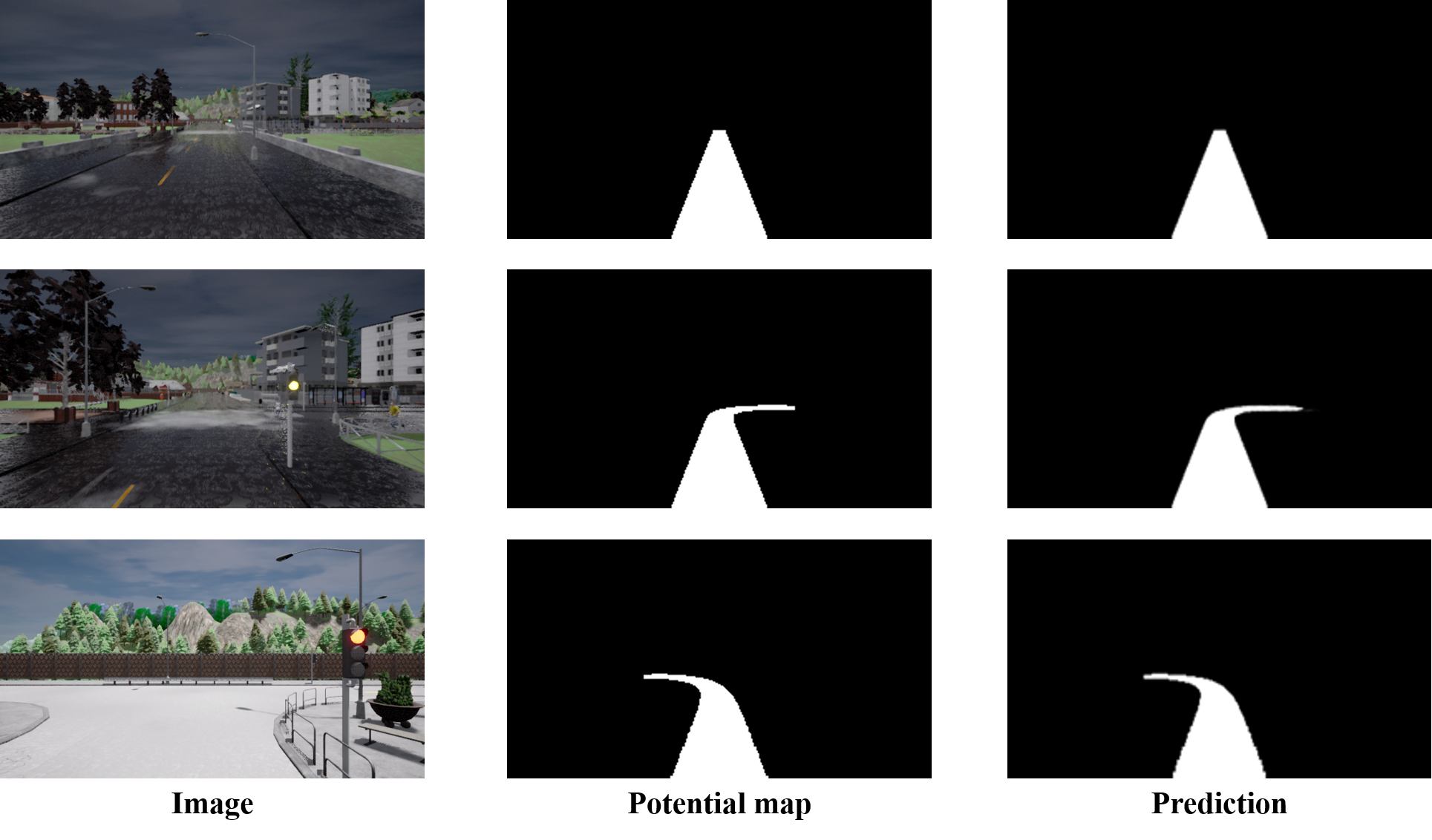
Results¶
The ground-truth potential map and predicted potential map on evaluation dataset at the first stage:
The MSE loss of position, velocity, and acceleration on evaluation dataset at the second stage:
position loss |
0.00024 |
velocity loss |
0.44275 |
acceleration loss |
3.52583 |
We provide pre-train weights under these configs. You can download it using this link
Benchmark Evaluating¶
The Benchmark evaluation runs with the two trained network in a Carla town suite. You may need to change the environment num, server IP and port and suite’s name in config.
Default configuration:
eval_config = dict(
env=dict(
env_num=5,
simulator=dict(
verbose=False,
disable_two_wheels=True,
waypoint_num=32,
obs=(
dict(
name='rgb',
type='rgb',
size=[640, 360],
position=[0.5, 0.0, 2.5],
rotation=[0, 0, 0],
),
dict(
name='lidar',
type='lidar',
channels=64,
range=50,
points_per_second=100000,
rotation_frequency=30,
upper_fov=10,
lower_fov=-30,
position=[0.5, 0.0, 2.5],
rotation=[0, 0, 0],
)
),
planner=dict(type='behavior', resolution=1),
),
col_is_failure=True,
stuck_is_failure=True,
manager=dict(
shared_memory=False,
auto_reset=False,
context='spawn',
max_retry=1,
),
),
server=[
dict(carla_host='localhost', carla_ports=[9000, 9010, 2])
],
policy=dict(
target_speed=25,
eval=dict(
evaluator=dict(
suite='FullTown01-v1',
episodes_per_suite=5,
transform_obs=True,
),
),
),
)
policy_config = dict(
model=dict(
gan_ckpt_path='_logs/sample/cict_GAN/checkpoints/3000.pth',
traj_ckpt_path='_logs/sample/cict_traj/checkpoints/65000.pth'
),
SAVE_DIR='vis',
IMG_HEIGHT=128,
IMG_WIDTH=256,
SENSORS=dict(rgb=[3, 360, 640]),
DEST=0,
SPEED_FACTOR=25.0,
MODEL_CONFIGURATION=dict(
generator=dict(
down_channels=[6, 64, 128, 256, 512, 512, 512, 512],
up_channels=[0, 512, 512, 512, 256, 128, 64],
kernel_size=4,
stride=2,
padding=1,
down_norm=[False, True, True, True, True, True, False],
up_norm=[True, True, True, True, True, True],
down_dropout=[0, 0, 0, 0.5, 0.5, 0.5, 0.5],
up_dropout=[0.5, 0.5, 0.5, 0, 0, 0],
final_channels=1,
num_branches=1,
),
traj_model=dict(
input_dim=1,
hidden_dim=256,
out_dim=2
)
),
MAX_DIST=25.,
MAX_T=1,
IMG_STEP=1,
PRED_LEN=10,
DT=0.1,
PRED_T=3
)
Evaluating on the Carla Benchmark:
python cict_eval.py
Testing with visualization:
python cict_test.py
@ARTICLE{9361054,
author={Wang, Yunkai and Zhang, Dongkun and Wang, Jingke and Chen, Zexi and Li, Yuehua and Wang, Yue and Xiong, Rong},
journal={IEEE Robotics and Automation Letters},
title={Imitation Learning of Hierarchical Driving Model: From Continuous Intention to Continuous Trajectory},
year={2021},
volume={6},
number={2},
pages={2477-2484},
doi={10.1109/LRA.2021.3061336}
}