DT (DecisionTransformer)¶
综述¶
如果想要将强化学习技术应用在某个决策领域,最重要的就是将原始问题转换为一个合理的 MDP (马尔科夫决策过程)问题,而一旦问题环境本身有一些不那么友好的”特性“(比如部分可观测,非平稳过程等等),常规强化学习方法的效果便可能大打折扣。另一方面,随着近些年来数据驱动范式的发展,大数据和预训练大模型在计算机视觉(Computer Vision)和自然语言处理(Natural Language Processing)领域大放异彩,比如 CLIP,DALL·E 和 GPT-3 等工作都取得了惊人的效果,序列预测技术便是其中的核心模块之一。但对于决策智能,尤其是强化学习(Reinforcement Learning),由于缺少类似 CV 和 NLP 中的大数据集和适合的预训练任务,决策大模型迟迟没有进展。
在这样的背景下,为了推进决策大模型的发展,提高相关技术的实际落地价值,许多研究者开始关注 Offline RL/Batch RL 这一子领域。具体来说,Offline RL是一种只通过离线数据集(Offline dataset)训练策略(Policy),在训练过程中不与环境交互的强化学习任务。那对于这样的任务,是否可以借鉴 CV 和 NLP 领域的一些研究成果,比如序列预测相关技术呢?
于是乎,在2021年,以 Decision Transformer[3]/Trajectory Transformer[1-2]为代表的一系列工作出现了,试图将决策问题归于序列预测,将 transformer 结构应用在RL任务上,同时与语言模型,如 GPT-x 和 BERT 等联系起来。不像传统 RL 中计算 value 函数或计算 policy 梯度, DT 通过一个屏蔽后序的 transformer 直接输出最有动作选择。通过指定期望模型达到的reward,同时借助 states 和 actions 信息,就可以给出下一动作并达到期望的 reward。 DT 的达到并超过了 SOTA model-free offline RL 算法在 Atari,D4RL (MuJoCo) 等环境上的效果。
快速了解¶
DT 是一个 offline 强化学习算法。
DT 支持 离散(discrete) 和 连续(continuous) 动作空间。
DT 使用 transformer 进行动作预测,但是对 self-attention 的结构进行了修改。
DT 的数据集结构是由算法特点决定的,在进行模型训练和测试中都要符合其要求。
重要公示/重要图示¶
DT 的结构图如下:
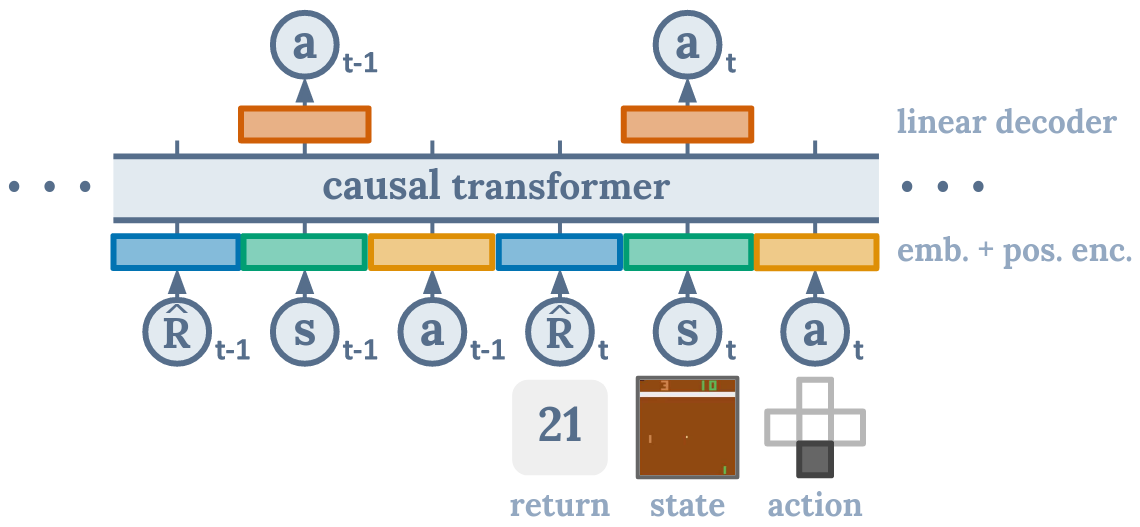
图示说明 DT 算法在进行动作 at 的预测时,仅与当前时间步的 rt 和 st 以及之前的 rt-n, st-n, at-n 相关,与之后的无关, causal transformer 就是用来实现这一效果的模块。
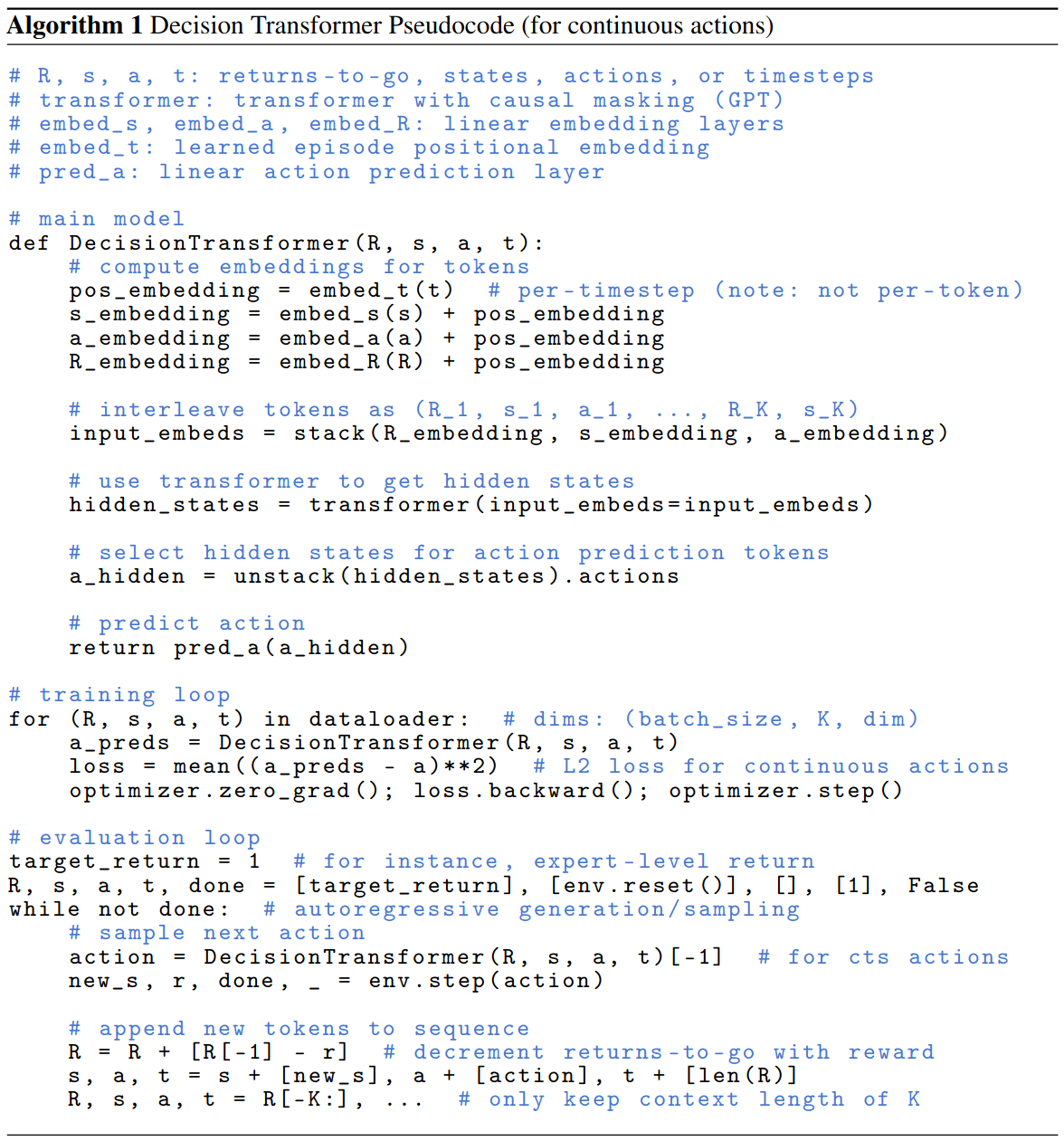
伪代码¶
实现¶
DQNPolicy 的默认 config 如下所示:
- class ding.policy.DTPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]
- Overview:
Policy class of Decision Transformer algorithm in discrete environments. Paper link: https://arxiv.org/abs/2106.01345.
其中使用的神经网络接口如下所示:
- class ding.model.DecisionTransformer(state_dim: int | SequenceType, act_dim: int, n_blocks: int, h_dim: int, context_len: int, n_heads: int, drop_p: float, max_timestep: int = 4096, state_encoder: Module | None = None, continuous: bool = False)[source]
- Overview:
The implementation of decision transformer.
- Interfaces:
__init__,forward,configure_optimizers
- forward(timesteps: Tensor, states: Tensor, actions: Tensor, returns_to_go: Tensor, tar: int | None = None) Tuple[Tensor, Tensor, Tensor][source]
- Overview:
Forward computation graph of the decision transformer, input a sequence tensor and return a tensor with the same shape.
- Arguments:
timesteps (
torch.Tensor): The timestep for input sequence.states (
torch.Tensor): The sequence of states.actions (
torch.Tensor): The sequence of actions.returns_to_go (
torch.Tensor): The sequence of return-to-go.tar (
Optional[int]): Whether to predict action, regardless of index.
- Returns:
output (
Tuple[torch.Tensor, torch.Tensor, torch.Tensor]): Output contains three tensors, they are correspondingly the predicted states, predicted actions and predicted return-to-go.
- Examples:
>>> B, T = 4, 6 >>> state_dim = 3 >>> act_dim = 2 >>> DT_model = DecisionTransformer( state_dim=state_dim, act_dim=act_dim, n_blocks=3, h_dim=8, context_len=T, n_heads=2, drop_p=0.1, ) >>> timesteps = torch.randint(0, 100, [B, 3 * T - 1, 1], dtype=torch.long) # B x T >>> states = torch.randn([B, T, state_dim]) # B x T x state_dim >>> actions = torch.randint(0, act_dim, [B, T, 1]) >>> action_target = torch.randint(0, act_dim, [B, T, 1]) >>> returns_to_go_sample = torch.tensor([1, 0.8, 0.6, 0.4, 0.2, 0.]).repeat([B, 1]).unsqueeze(-1).float() >>> traj_mask = torch.ones([B, T], dtype=torch.long) # B x T >>> actions = actions.squeeze(-1) >>> state_preds, action_preds, return_preds = DT_model.forward( timesteps=timesteps, states=states, actions=actions, returns_to_go=returns_to_go ) >>> assert state_preds.shape == torch.Size([B, T, state_dim]) >>> assert return_preds.shape == torch.Size([B, T, 1]) >>> assert action_preds.shape == torch.Size([B, T, act_dim])
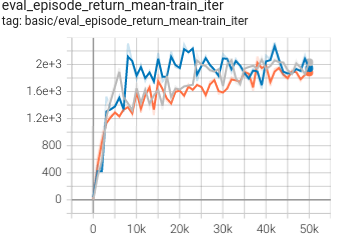
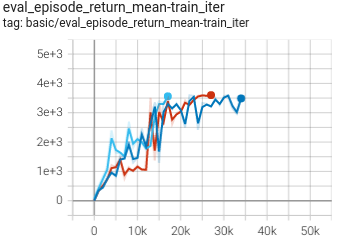
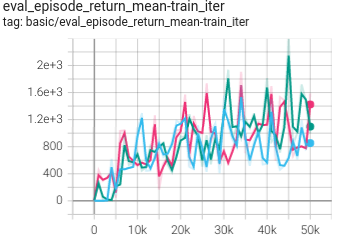
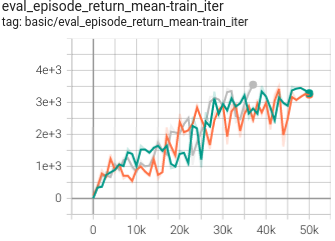
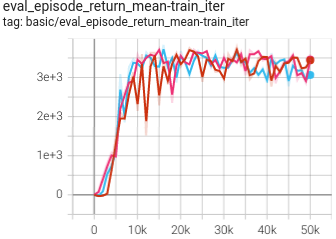
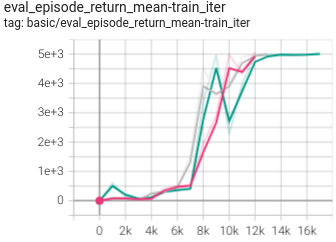
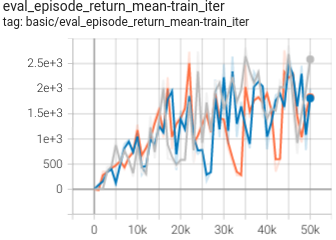
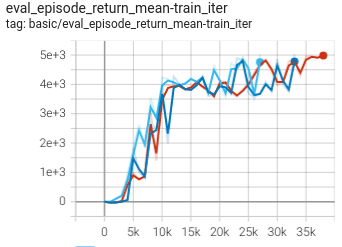
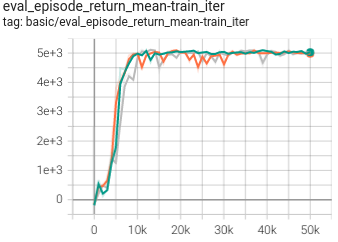
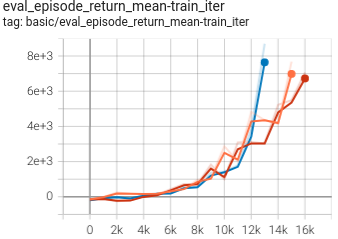
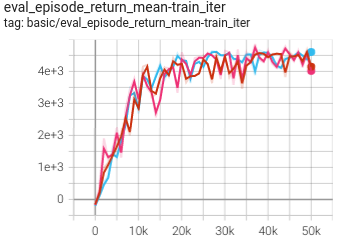
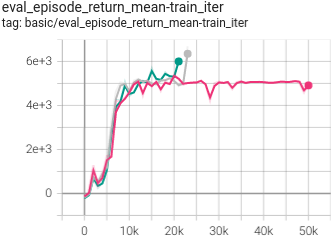
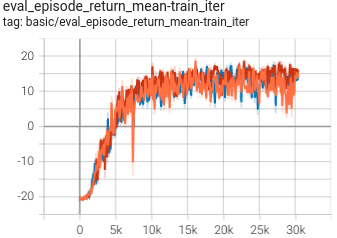
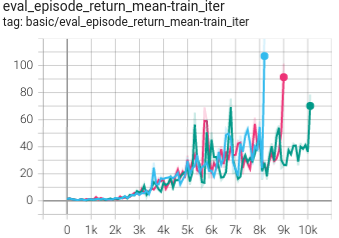
实验 Benchmark¶
environment |
best mean reward (normalized) |
evaluation results |
config link |
comparison |
|---|---|---|---|---|
Hopper
(Hopper-medium)
|
0.753 +- 0.035 |
|
DT paper |
|
Hopper
(Hopper-expert)
|
1.170 +- 0.003 |
|
DT paper |
|
Hopper
(Hopper-medium-replay)
|
0.651 +- 0.096 |
|
DT paper |
|
Hopper
(Hopper-medium-expert)
|
1.150 +- 0.016 |
|
DT paper |
|
Walker2d
(Walker2d-medium)
|
0.829 +- 0.020 |
|
DT paper |
|
Walker2d
(Walker2d-expert)
|
1.093 +- 0.004 |
|
DT paper |
|
Walker2d
(Walker2d-medium-replay)
|
0.603 +- 0.014 |
|
DT paper |
|
Walker2d
(Walker2d-medium-expert)
|
1.091 +- 0.002 |
|
DT paper |
|
HalfCheetah
(HalfCheetah-medium)
|
0.433 +- 0.0007 |
|
DT paper |
|
HalfCheetah
(HalfCheetah-expert)
|
0.662 +- 0.057 |
|
DT paper |
|
HalfCheetah
(HalfCheetah-medium-replay)
|
0.401 +- 0.007 |
|
DT paper |
|
HalfCheetah
(HalfCheetah-medium-expert)
|
0.517 +- 0.043 |
|
DT paper |
|
Pong
(PongNoFrameskip-v4)
|
0.956 +- 0.020 |
|
DT paper |
|
Breakout
(BreakoutNoFrameskip-v4)
|
0.976 +- 0.190 |
|
DT paper |
注:
以上结果是在3个不同的随机种子(即123, 213, 321)运行相同的配置得到
参考文献¶
Zheng, Q., Zhang, A., & Grover, A. (2022, June). Online decision transformer. In international conference on machine learning (pp. 27042-27059). PMLR.