End-to-End Model-Free Reinforcement Learning for Urban Driving using Implicit Affordances¶
Implicit Affordances is an end-to-end auto driving policy trained with Supervised Learning as well as Reinforcement Learning. It first trains backbone network with some implicit information as label, then freezes the backbone network and train the head of network using RL. It takes 4-frame RGB captured by front camera as in put. The model of the two training stage is shown as follow.
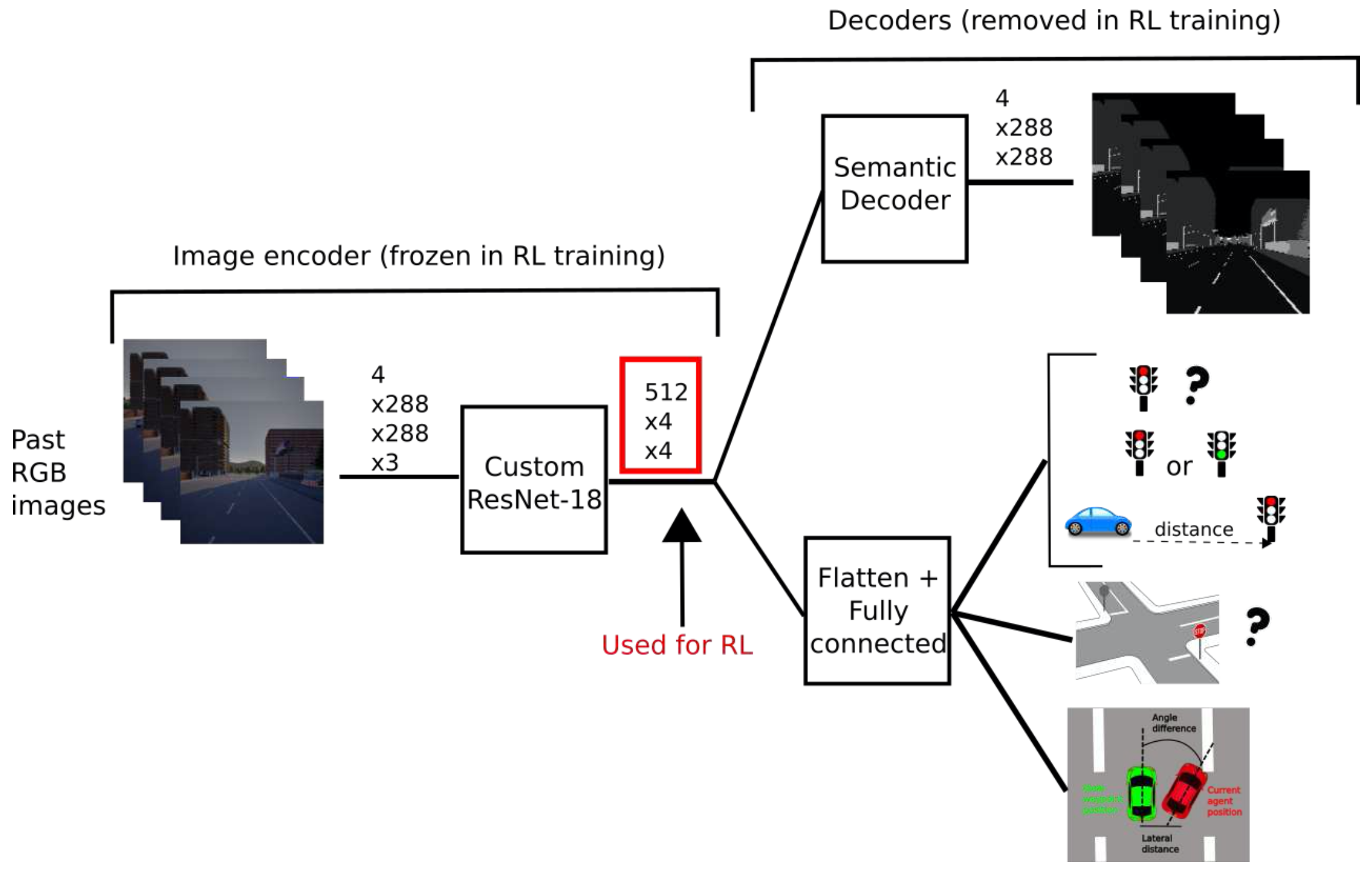
SL training pipeline¶
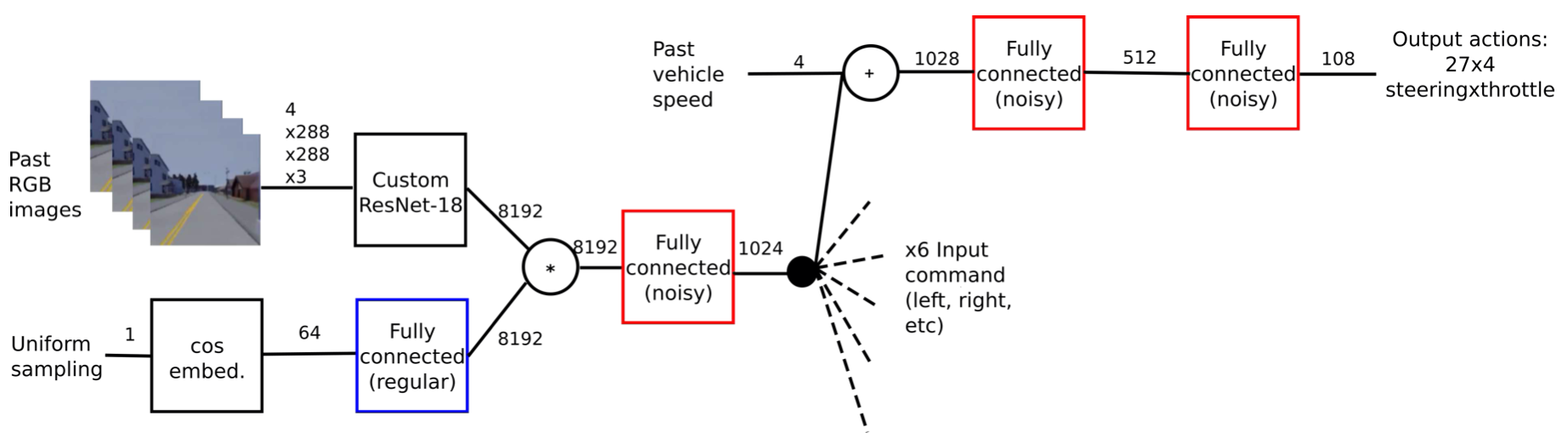
RL training pipeline¶
We extend and modified some of the training and environment details to make Implicit Affordances able to run in multi-lane maps in Carla. This is so far the first driving policy to run FullTown navigation in Carla using Reinforcement Learning. It achieves the same performance as in single-lane maps.
Training Models¶
Start one or more CARLA server instances
Prepare dataset for supervised leanring
python collect_data.pySomething you need to modify in the config of
collect_data.py:save_dir: the root dir of dataset
server: your Carla servers’ ip and port
env_num: how many subprocesses(envs) to use for collecting data
Pre-train the encoder in a supervised way
python train_sl.pySomething you need to modify in
train_sl.py:gpus: the list of gpus
log_dir: save log and models
dataset_dir: the root dir of dataset
Train the agent with reinforcement Learning, the log and models will be saved in
./logpython train_rl.py --supervised_model_path /path/to/supervised_model.pth \ --crop-sky
Something you need to modify in
train_rl.py:train_host_ports: your Carla servers’ ip and port for training
val_host_ports: your Carla servers’ ip and port for evaluation
env_num: how many subprocesses(envs) to use for training
town: if you want to train agents in the environment with multiple lanes, it can be set to Town04. Otherwise, it can be set to Town01 or Town02
Benchmarking models¶
Make dirs
mkdir [MODEL_PATH] && cd [MODEL_PATH]
mkdir model_supervised
mkdir model_RL
Copy the pre-train model into
[MODEL_PATH]/model_supervisedand copy the rl model into[MODEL_PATH]/model_RLRun
python eval.py --crop-sky --path-folder-model [MODEL_PATH]
Something you need to modify in
eval.py:server: your Carla servers’ ip and port
suit: set the maps and routes for testing (ex. town2, StraightTown01, ChangeLaneTown04)
env_num: how many subprocesses(envs) to use for evaluting
Evaluation¶
Running CARLA Server¶
With Display¶
./CarlaUE4.sh --world-port=2000 -opengl # If you run multiple servers at one time, you should modify the world port
Without Display¶
SDL_VIDEODRIVER=offscreen SDL_HINT_CUDA_DEVICE=0 ./CarlaUE4.sh --world-port=2000 -opengl
# If you run multiple servers at one time, you should modify the world port
Evaluation for Town01¶
cd demo/implicit
wget http://opendilab.org/download/DI-drive/implicit/models_town01.tar.gz
tar xvf models_town01.tar.gz
python eval.py --crop-sky --path-folder-model models_town01
Evaluation for Town04¶
cd demo/implicit
wget http://opendilab.org/download/DI-drive/implicit/models_town04.tar.gz
tar xvf models_town04.tar.gz
python eval.py --crop-sky --path-folder-model models_town04 #
Something you need to modify in eval.py:
server: your Carla servers’ ip and port
suit: set the maps and routes for testing (ex. town2, StraightTown01, ChangeLaneTown04)
env_num: how many subprocesses(envs) to use for evaluting
Results¶
You can go to Benckmark page to see results of the two provided pre-train weights.
Training Cost¶
Collect data: about 48Carla / hours
Pre-train the encoder: about 4 gpu (32G V100) / days
Train the agent(Single Lane): about 60Carla (32G V100) / days
Train the agent(Multiple Lanes): about 100Carla (32G V100) / days